
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по цифровым устройствам
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Курсовая работа: Автоматизация вельц печи для переработки цинковых кеков
Курсовая работа: Автоматизация вельц печи для переработки цинковых кеков
Задание на курсовой проект
Наименование объекта регулирования – вельц печь для переработки цинковых кеков.
U – угол перемещения заслонки на трубопроводе вытяжного вентилятора, %
y – разряжение газов на входе в котел-утилизатор, мм.в.ст.
В таблице 1 представлена безразмерная кривая разгона
Таблица 1 – Безразмерная кривая разгона
|
tб |
0 | 1 | 2 | 3 | 4 | 5 | 6 |
|
Δyб |
0 | 0,01 | 0,07 | 0,25 | 0,43 | 0,58 | 0,70 |
|
tб |
7 | 8 | 9 | 10 | 11 | 12 | 13 |
|
Δyб |
0,78 | 0,84 | 0,88 | 0,91 | 0,94 | 0,96 | 0,97 |
|
tб |
14 | 15 | 16 | 17 | 18 | 19 | |
|
Δyб |
0,98 | 0,985 | 0,99 | 1 | 1 | 1 |
Масштаб времени Мt = 2,4 мин, масштаб для регулируемой переменной Мy = 4,3
Приборный состав системы регулирования:
- дифференциальный манометр для дистанционной передачи сигнала давления – по месту;
- преобразователь сигнала от дифференциального манометра – на щите;
- показывающий и самопишущий прибор – на щите;
- регулятор импульсный на щите;
- переключатель «ручное управление – автоматическое управление», включаемый после регулятора – на щите;
- пускатель бесконтактный реверсивный для включения исполнительного механизма – на щите;
- исполнительный механизм привода заслонки – рядом с заслонкой.
Содержание
Введение
1. Построение кривой разгона
2. Определение передаточной функции методом площадей
3. Вычисление настроек регуляторов и исследование статистических свойств системы регулирования
4. Исследование устойчивости системы регулирования
5. Определение передаточной функции замкнутой системы регулирования
6. Определение качества регулирования
7. Функциональная схема системы регулирования
8. Назначение элементов системы и ее работа. Принцип действия измерительного преобразования
Выводы
Список литературы
Введение
Основной задачей любого процесса управления является выработка и реализация таких решений, которые при данных условиях обеспечивают наиболее эффективное достижение поставленной цели.
Процессы управления совершаются над объектами управления (ОУ), под которыми понимаются части технологического процесса или агрегата, целиком технологические процессы, агрегаты, машины, цехи, производственные предприятия, коллективы людей.
Протекание всякого технологического процесса характеризуется совокупностью физических величин, на которые накладываются определенные условия. Процессом управления называется совокупность операций, необходимых для пуска, остановки ОУ, а также для поддержания и изменения в требуемом направлении величин, характеризующих технологический процесс. Целью управления технологическими процессами может быть поддержание постоянного значения физической величины с заданной точностью в установившемся и переходном режимах, изменение величины по определенной наперед заданной программе.
Если управление осуществляется непосредственно человеком, то такое управление называют ручным; если же управление осуществляется без непосредственного участия человека, то его называют автоматическим. Автоматическое управление производится с помощью автоматически действующих управляющих устройств. Объект управления и управляющие устройства составляют автоматическую систему управления (АСУ). В наиболее простых случаях (поддержание постоянного значения параметра, изменение параметра но жесткой программе) процесс управления называют регулированием, управляющие устройства — автоматическими регуляторами, или просто регуляторами, а автоматические системы управления -автоматическими системами регулирования (АСР).
1 Построение кривой разгона
Кривой разгона называют процесс изменения во времени выходной переменной, вызванный ступенчатым входным воздействием. Кривая разгона служит для определения динамических свойств объекта.
Запаздывание объекта выражается в том, что его выходная величина начинает изменяться не сразу после нанесения возмущения, а только через некоторый промежуток времени, называемым временем запаздывания.
Под постоянной времени объекта понимается время, в течение которого выходная величина достигла бы своего нового установившегося значения, если бы она изменялась с постоянной скоростью, равной скорости ее изменения в начальный момент времени.
Коэффициент передачи объекта представляет собой изменение выходной величины объекта при переходе из начального в новое установившееся состояние, отнесенное к изменению возмущения на входе [1].
Снятие кривой разгона предусматривает нанесение на объект ступенчатого возмущения путем энергичного изменения степени открытия проходного сечения регулирующего органа, при этом отмечают величину и момент нанесения возмущения. Изменения выходной величины регистрируют до тех пор, пока объект не примет установившееся значение.
Кривая разгона отличается от переходной характеристики тем, что амплитуда «скачка» может быть произвольной, в то время как переходная характеристика есть реакция объекта управления на единичный скачок по управляющей переменной [2].
Кривая разгона получается пересчетом безразмерной кривой разгона по формулам
t = Mt . tб
Δy = My . Δyб
где t – реальное время,
tб – безразмерное время,
Mt – масштаб времени,
My – масштаб регулируемой переменной,
Δy – изменение регулируемой переменной в натуральных единицах,
Δyб – изменение регулируемой переменной в безразмерном виде
Рассчитаем кривую разгона (таблица 2)
Таблица 2 – Пересчитанная кривая разгона
| t, мин | 0 | 2,4 | 4,8 | 7,2 | 9,6 | 12 | 14,4 |
| Δy, мм.в.ст. | 0 | 0,043 | 0,301 | 1,075 | 1,849 | 2,494 | 3,01 |
| t, мин | 16,8 | 19,2 | 21,6 | 24 | 26,4 | 28,8 | 31,2 |
| Δy, мм.в.ст. | 3,354 | 3,612 | 3,784 | 3,913 | 4,042 | 1,128 | 4,171 |
| t, мин | 33,6 | 36 | 38,4 | 40,8 | 43,2 | 45,6 | |
| Δy, мм.в.ст. | 4,214 | 4,2355 | 4,257 | 4,3 | 4,3 | 4,3 |
Кривая разгона представлена на рисунке 1.
Определим параметры аппроксимации кривой разгона. Касательная касается кривой разгона в точке А1, соответствующей максимальной крутизне.
В соответствии с рисунком 1 коэффициент передачи равен
Коб = Δyуст / ΔU
Коб = 4,3 / 8 = 0,54 мм.в.ст./%
где Δyуст – установившееся значение выходной переменной,
ΔU – изменение входной переменной.
Передаточная функция данной аппроксимации будет иметь вид

![]()
где Коб коэффициент передачи объекта,
Тоб постоянная времени (Тоб = 18 – 4 = 14 мин),
τоб время запаздывания, (τоб = 4 мин),
S – переменная Лапласа.
2 Определение передаточной функции методом площадей
Передаточная функция второго порядка может быть представлена в следующем виде

Коэффициенты а1 и а2 вычисляются по формулам
а1 = F1 = Δt {∑ [1-Δyб (Δt . i)] – 0,5},

где n – количество интервалов разбиения кривой разгона (n=19),
Δt – интервал разбиения (Δt = Мt = 2,4 мин),
Δyб (t . i) – значение безразмерной кривой разгона в i-й момент времени.
Тогда
а1 = F1 = 2,4{ (1-0) + (1 – 0,1) + (1 – 0,07) + (1 – 0,25)+(1 – 0,43)+(1 – 0,58) + (1 – 0,7) + (1 – 0,78) + (1 – 0,84) + (1 – 0,88) + (1 – 0,91) + (1 – 0,94)
+ (1 – 0,96) + (1 – 0,97) + (1 – 0,98) + (1 – 0,985) + (1 – 0,99) – 0,5 }=
= 2,4 . 5,225 = 12,54 мин
![]()
![]()
![]()


![]() мин 2
мин 2
Передаточная функция второго порядка будет иметь вид
Определение передаточной функции методом площадей является более сложным по сравнению с определением по кривой разгона. Однако передаточная функция второго порядка имеет более точное представление.
3 Вычисление настроек регуляторов и исследование статических свойств системы регулирования
Автоматическое устройство, обеспечивающее поддержание выходных величин объекта вблизи требуемых значений, называют автоматическим регулятором.
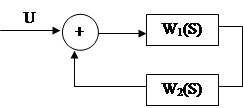
Регулятор реализует закон регулирования. Структурная схема системы регулирования представлена на рисунке 2.
 |
|
|||
Рисунок 2 – Структурная схема системы регулирования
Целью регулирования является выполнение условия ε = y3 – y = 0
Основные законы регулирования:
1) релейный (р- закон)
0, если ε ≤0
U = 1, если ε>0
![]() где 1 – включено, 0 – выключено
где 1 – включено, 0 – выключено
Преимущество: простота реализации, недостаток: низкое качество регулирования.
2) пропорциональный (п-закон)
U = КП . ε
где КП коэффициент передачи регулятора.
Преимущества: простота реализации, высокое быстродействие, недостатки: ненулевая ε, низкое качество регулирования.
3) Интегральный (И-закон)
 ,
,
где ТИ постоянная интегрирования.
Преимущества: отсутствие ошибки в установившемся режиме, недостатки: низкое быстродействие и склонность к автоколебаниям.
4) Пропорционально-интегральный (ПИ-закон)

Обладает преимуществами П- и И- регуляторов. Недостаток: сложность.
Определим КП для П-регулятора по формуле


Для ПИ- регулятора


ТИ = 0,6 . ТОБ = 0,6 . 14 = 8,4 мин
Для определения статической ошибки системы регулирования нужно изобразить эту систему, содержащую регулятор КП и объект КОБ (рисунок 3).

Рисунок 3 – Структурная схема замкнутой системы регулирования
Коэффициент передачи последовательного соединения звеньев равен
К1 = КП . КОБ
Коэффициент передачи обратной связи К2 = 1
Коэффициент передачи замкнутой системы в статике

Принимая величину изменения задания yЗ = 1, находим установившееся значение
yуст = 1 . 0,51 = 0,51
Тогда статическая ошибка равна
![]()
Для уменьшения статической ошибки и сохранения других показателей качества регулирования необходимо применять другие законы регулирования (например И- или ПИ- закон).
4 Исследование устойчивости системы регулирования
Под устойчивостью понимают свойство системы самостоятельно возвращаться к равновесному состоянию после снятия возмущения, нарушевшего ее равновесие.
Устойчивость линейной системы определяется характером его свободного движения, которое описывается однородным дифференциальным уравнением
![]()
При вещественных корнях решение имеет вид
y(t)= c1 . eP1t + c2 . eP2t + …+ cn . ePnt ,
где cn – постоянная интегрирования
pn – корни характеристического уравнения
an . pn + an-1 . pn-1 + …+a0 = 0
Для устойчивой работы системы необходимо, чтобы Pi<0
Решение характеристического уравнения сложно, поэтому разработаны другие критерии устойчивости.
Частотным критерием Найквиста определяют устойчивость замкнутой системы по поведению соответствующей ей разомкнутой системы.
Если в разомкнутом состоянии система устойчива и ее амплитудно-фазовая характеристика (АФХ) при изменении частоты W от нуля до бесконечности не охватывает на комплексной плоскости точку с координатами (-1;0), то система в замкнутом состоянии будет устойчива. АФХ охватывает точку, если точка лежит внутри контура, образованного характеристиками и отрезками действительной оси, соединяющей точки ноль и бесконечность.
Выполним исследование системы на устойчивость. Определим АФХ разомкнутой системы с П-регулятором. Для получения передаточной функции приведем рисунок 4.

Рисунок 4 Функциональная схема разомкнутой системы регулирования
Передаточная функция разомкнутой системы будет иметь вид
WРАЗ (S) = WP (S) . WОБ (S)
Выполняя замену WР = КП, WОБ (S) = j w получим

Избавляясь от мнимости в знаменателе, получим АФХ в алгебраической форме


Подставляя в полученное выражение численные значения, получим АФХ для исследования устойчивости


Для исследования устойчивости нужно построить годограф АФХ, для чего выполним вычисление R(w) и Im(w) для различных w. Результаты вычислений сведем в таблицу 3.
Таблица 3 – Расчет АФХ разомкнутой системы
| w, мин | R(w) | Im(w) | w, мин | R(w) | Im(w) |
| 0 | 1,05 | 0 | 0,10 | 0,28 | -0,69 |
| 0,01 | 1,04 | -0,12 | 0,11 | 0,19 | -0,68 |
| 0,02 | 1,00 | -0,25 | 0,12 | 0,11 | -0,65 |
| 0,03 | 0,95 | -0,36 | 0,13 | 0,05 | -0,61 |
| 0,04 | 0,88 | -0,46 | 0,14 | -0,01 | -0,57 |
| 0,05 | 0,79 | -0,55 | 0,15 | -0,05 | -0,52 |
| 0,06 | 0,69 | -0,61 | 0,20 | -0,15 | -0,34 |
| 0,07 | 0,59 | -0,66 | 0,30 | -0,14 | -0,14 |
| 0,08 | 0,48 | -0,69 | 0,40 | -0,10 | -0,06 |
| 0,09 | 0,38 | -0,70 | 0,50 | -0,07 | -0,03 |
По результатам расчетов строим годограф (рисунок 5). Из рисунка видно, что система в замкнутом состоянии будет устойчива.
5 Определение передаточной функции замкнутой системы регулирования
Любую систему автоматического регулирования можно представить в виде совокупности различных звеньев, соединенных между собой тем или иным образом. На рисунке 6 представлена схема последовательного соединения звеньев

Рисунок 6 – Структурная схема последовательного соединения звеньев
На рисунке 7 приведена схема параллельного соединения звеньев
 |
|||
 |
|||
Рисунок 7 – Структурная схема параллельного соединения звеньев
|
 |
|||||
 |
|||||
|
|||||
Рисунок 8 – Структурная схема обратной связи
Используя правило структурных преобразований, найдем передаточную функцию замкнутой системы регулирования, представленной на рисунке 3.
Передаточная функция пропорционального звена имеет вид
WР = КП,
где КП коэффициент передачи регулятора.
Передаточная функция колебательного звена имеет вид


Передаточная функция обратной связи W2 = 1
Тогда передаточная функция замкнутой системы будет иметь вид

После подстановки численных значений получим


6 Определение качества регулирования
Качество переходного процесса количественно оценивается следующими показателями
1 Статическая ошибка регулирования есть рассогласование между установившемся значением регулируемой величины после переходного процесса и ее заданным значением
δст абс = (yЗ – yУСТ) . 100%
где yЗ – величина ступенчатого изменения задания,
yУСТ – установившееся значение регулируемой переменной
2 Динамическая ошибка регулирования есть максимальное отклонение регулируемой переменной в переходном процессе от ее заданного значения

где yMAX – максимальное значение регулируемой переменной после ступенчатого изменения задания.
3 Время регулирования есть отрезок, в течении которого регулируемая величина достигает нового установившегося значения с некоторой, заранее установленной точностью, ±Δ.
Вычислим и построим переходную функцию замкнутой системы регулирования с П-регулятором и графически определим показатели качества.
Переходная функция для системы с передаточной функцией вида


Вычисляется по формуле

где α = 0,5 . (b1 / b2)


Следует учесть, что φ0, βt + φ0 – углы в радианах.
Формулы применимы, если выполняется равенство
0 ≤ 0,61<1 → неравенство выполняется
α = 0,5 . (6,12 / 25,37) = 0,12


Тогда

Вычислим значение h(t) в зависимости от времени (таблица 4).
Таблица 4 – Расчет значений h(t) в зависимости от времени
| t, мин | h(t) |
| 0 | 0 |
| 5 | 0,10 |
| 10 | 0,31 |
| 15 | 0,44 |
| 20 | 0,49 |
| 25 | 0,53 |
| 30 | 0,528 |
| 35 | 0,52 |
| 40 | 0,50 |
| 45 | 0,51 |
| 50 | 0,51 |
Переходная функция изображена на рисунке 9.
Статическая ошибка равна
![]()
Динамическая ошибка равна

Время регулирования tР = 16,5 мин
7 Функциональная схема системы регулирования
Рисунок 10 - Функциональная схема автоматизации
Таблица 5 – Перечень приборов для функциональной схемы
| Обозначение | Наименование | Количество | Примечание |
| 1 а | Дифференциальный манометр для дистанционной передачи давления | 1 | |
| 1 б | Преобразователь сигнала от дифференциального манометра | 1 | |
| 1 в | Показывающий и самопишущий прибор | 1 | |
| 1 г | Регулятор импульсный | 1 | |
| 1 д | Переключатель «ручное управление – автоматическое управление», включаемый после регулятора | 1 | |
| 1 е | Пускатель бесконтактный реверсивный для включения исполнительного механизма | 1 | |
| 1 ж | Исполнительный механизм привода заслонки | 1 |
8 Назначение элементов системы и ее работа. Принцип действия измерительного преобразователя
Процесс вельцевания осуществляется в трубчатых вращающихся печах. Печь представляет собой стальной барабан, расположенный под углом 3-5 0 к горизонту для того, чтобы шихта могла передвигаться при вращении барабана от верхнего конца к нижнему. Скорость вращения барабана 1-2 об/мин. По всей длине печь футруют огнеупорным кирпичем.
Печь опирается на катки, при этом обычно ее ставят на три опоры. Одна из опор совмещается с приводом печи от электродвигателя через редуктор и венечную шестерню, укрепленную на барабане печи. У нижнего разгрузочного конца печи размещают топочные устройства мазутные или газовые горелки.
Шихту подают в верхний загрузочный конец печи через водоохлаждаемую трубу. Передвигаясь при вращении печи, шихта вступает в контакт с горячими газами, идущими противотоком, теряет влагу и нагревается. В конце верхней зоны печи шихта воспламеняется и поступает в зону возгонки. По мере продвижения к разгрузочному концу печи шихта все более обедняется цинком и свинцом.
В процессе особое внимание уделяется контролю и регулированию разряжения газов на входе в котел-утилизатор при помощи перемещения заслонки на трубопроводе вытяжного вентилятора [3].
В системах автоматического управления для измерения текущих значений величин химико-технологических процессов используются различные измерительные устройства. Средство измерения, предназначенное для выработки сигнала измерительной информации в форме, доступной для непосредственного восприятия наблюдателем, называют измерительным прибором. Средство измерения, вырабатывающее сигнал, в форме, удобной для передачи, дальнейшего преобразования, но не позволяющей наблюдателю осуществить непосредственное восприятие, называют измерительным преобразователем. Первичный измерительный преобразователь – тот, к которому подведена измеримая величина, передающий измерительный преобразователь – тот, который предназначен для дистанционной передачи сигнала измерительной информации.
В курсовом проекте первичным измерительным преобразователем является дифференциальный манометр для дистанционной передачи сигнала давления.
Под абсолютным давлением понимают полное давление газа на его стенки. При РАБС < РАТМ разность между ними называется разряжением
Рh = РАТМ - РАБС
Принцип действия дифференциального манометра основан на измерении разности двух давлений. В курсовом проекте устанавливаем жидкостный дифманометр. В этом приборе измеряемое разряжение уравновешивается гидростатическим давлением столба рабочей жидкости, в качестве которой применяются ртуть, вода, спирт и др.
На рисунке 11 показана принципиальная схема U-образного дифманометра.
|

Рисунок 11 Принципиальная схема U-образного дифманометра
Входной величиной является перепад давления, выходной – изменение уровня рабочей жидкости в U-образной трубке.
Промежуточным измерительным преобразователем называется элемент измерительного устройства, занимающий в измерительной цепи место после первичного преобразователя. Основное назначение промежуточного преобразователя – преобразование выходного сигнала первичного преобразователя в форму, удобную для последующего преобразования в сигнал измерительной информации для дистанционной передачи.
Показывающий и самопишущий прибор предназначен для автоматического преобразования и документальной записи на бумажной ленте с помощью карандаша результатов измерения физической величины (давления), характеризующую технологический процесс.
Устройство, с помощью которого в системах регулирования обеспечивается автоматическая поддержка технологической величины около заданного значения, называют автоматическим регулятором. Импульсный регулятор относится к регулятором прерывного действия, у которых непрерывному изменению входной величины соответствует прерывистое изменение регулирующего воздействия [2].
Пускатель бесконтактный реверсивный является усилителем сигнала управления и предназначен для включения исполнительного механизма.
Исполнительный механизм предназначен для управления регулирующим органом (заслонкой) [4].
Выводы
Система автоматизации вельц печи является устойчивой, следовательно, она может выполнять предписанные ей функции. В системе достаточно быстро устанавливается равновесие. Отрицательным показателем является большая статическая ошибка регулирования.
Список литературы
1 Каганов В.Ю., Блинов О.М., Беленький А.М. Автоматизация управления металлургическими процессами. М.: Металлургия, 1974 – 416 с.
2 Клюев А.С., Глазов Б.В., Миндин М.Б. Техника чтения схем автоматического управления и технологического контроля. – М.: Энергия, 1977 – 296 с.
3 Полоцкий Л.М., Лапшенков Г.И. Автоматизация химических производств. Теория, расчет и проектирование систем автоматизации. – М.: Химия, 1982 – 296 с.
4 Снурников А.П. Гидрометаллургия цинка. – М.: Металлургия, 1981 – 384 с.
© 2009 База Рефератов