
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по цифровым устройствам
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Курсовая работа: Проект автоматизированного электропривода грузового лифта
Курсовая работа: Проект автоматизированного электропривода грузового лифта
СОДЕРЖАНИЕ
1. ВВЕДЕНИЕ
2. ОПИСАНИЕ РАБОЧЕЙ МАШИНЫ И ЕЕ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
3. РАСЧЕТ МОМЕНТОВ СТАТИЧЕСКИХ СОПРОТИВЛЕНИЙ И ПРЕДВАРИТЕЛЬНЫЙ РАСЧЕТ МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ
4. ОБОСНОВАНИЕ ВЫБОРА РОДА ТОКА И ТИПА ЭЛЕКТРОПРИВОДА
5. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ И ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНОГО ЧИСЛА РЕДУКТОРА
6. РАСЧЕТ ПРИВЕДЕННЫХ СТАТИЧЕСКИХ МОМЕНТОВ, МОМЕНТОВ ИНЕРЦИИ И КОЭФФИЦИЕНТА ЖЕСТКОСТИ СИСТЕМЫ ЭЛЕКТРОПРИВОД – РАБОЧАЯ МАШИНА
7. ПРЕДВОРИТЕЛЬНАЯ ПРОВЕРКА ДВИГАТЕЛЯ ПО НАГРЕВУ И ПРОИЗВОДИТЕЛЬНОСТИ
8. ВЫБОР ПРЕОБРАЗОВАТЕЛЯ ИЛИ СТАНЦИИ УПРАВЛЕНИЯ
9. СОСТАВЛЕНИЕ СТРУКТУРНОЙ СХЕМЫ ЭЛЕКТРОПРИВОДА И РАСЧЕТ ЕЕ ПАРАМЕТРОВ
9.1 Структурная схема механической части электропривода
9.2 Структурная схема электромеханического преобразования энергии
9.3 Структурные схемы электрических преобразователей энергии
9.4 Структурные схемы электроприводов
10. РАСЧЕТ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ЭЛЕКТРОПРИВОДА
10.1 Естественные характеристики асинхронного двигателя
10.2 Расчет частоты и напряжения двигателя в системе ПЧ–АД при работе в заданной точке
10.3 Расчет частоты и тока статора двигателя в системе источник тока – асинхронный двигатель (ИТ-АД)
10.4 Расчет параметров схем включения, обеспечивающих пуск и торможение двигателя
11 РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ И ПОСТРОЕНИЕ НАГРУЗОЧНЫХ ДИАГРАММ
11.1 Переходные процессы в двигателе
11.2 Переходный процесс в механической части электропривода с упругими связями
11.3 Электромеханический переходный процесс
12 РАСЧЕТ ЭНЕРГЕТИЧЕСКИХ ПОКАЗАТЕЛЕЙ ЭЛЕКТРОПРИВОДА
13 ВЫБОР ПУСКОВЫХ И ТОРМОЗНЫХ РЕЗИСТОРОВ И ПРОВЕРКА ИХ ПО НАГРЕВУ
14 ЗАКЛЮЧЕНИЕ
15 СПИСОК ЛИТЕРАТУРЫ
Мехатронная система (МС) — это неразделимая совокупность механических, электромеханических и электронных узлов, в которых осуществляется преобразование и обмен энергии, информации.
В современных мехатронных системах преобразование движения одного или нескольких тел в требуемые движения других тел осуществляется системой тел (деталей), называемых механизмом. Механизмы входят в состав машин — технических систем (ТС) и предназначены для осуществления механических движений по преобразованию потоков энергии, силовых взаимодействий, необходимых для выполнения различных рабочих процессов. Часто силовой основой МС является электропривод постоянного или переменного тока, формирующий управляемую электромеханическую систему широкого назначения. Для электромеханических систем управления характерна тесная взаимосвязь электромеханической части с энергетическим каналом питания и каналом управления, что обуславливает ожидаемые характеристики проектируемого устройства часто в равной степени всеми функциональными звеньями. Управляемые комплексы с электрическим приводом (система, состоящая из двигателя и связанных с ним устройств приведения в движение одного или нескольких исполнительных механизмов, входящих в состав МС) получили название электромеханических систем (ЭМС).
Электромеханические (ЭМС) и мехатронные (МС) системы представляют собой вполне определенный класс технических систем (ТС) упорядоченное, целесообразное сочетание взаимосвязанных и взаимодействующих механических, электротехнических, электронных и микропроцессорных компонентов, образующих определенную управляемую целостность. Важнейшей составляющей любой технической системы является привод, используемый для осуществления движения каких-либо элементов ТС относительно других, преобразуя какой-либо вид энергии в механическую работу. Привод, являясь элементом (подсистемой) ТС, в общем случае состоит из трех основных частей: источника движения (двигателя), передачи, связывающей двигатель с перемещаемым элементом или' исполнительным органом машины или оборудования, и устройств управления (системы управления). Привод всегда имеет два канала — силовой и информационный. По первому транспортируется преобразуемая энергия, по второму осуществляется управление потоком энергии, а также сбор и обработка информации о состоянии и режимах функционирования приводной системы в целом. Для осуществления как силовых, так и управляющих функций привода используются различные виды энергии. По виду применяемой энергии приводы разделяют на электрические (электроприводы), гидравлические, пневматические и комбинированные, а по способу подключения к источнику питания — с автономным и не автономным энергоснабжением. В совокупности преобразования и распределения преобразуемой энергии приводы обычно составляют основную компоненту всех технических систем (ТС). В общем случае двигательные технические подсистемы представляют собой достаточно сложные управляемые энергосиловые устройства ТС, рассматриваемые как целесообразные и неразделимые совокупности источников энергопитания, исполнительных, двигателей (электрического, гидравлического, пневматического и теплового) и передаточных механизмов объекта управления, аппаратуры управления.
Аппаратура управления приводами осуществляет стабилизацию или изменение параметров движения (перемещения, скорости, ускорения, силовых воздействий) исполнительного (передаточного) механизма ИМ, рабочего органа РО ЭМС, МС, регулируя процесс преобразования и обмена энергией в силовом и информационном каналах управления.
Многообразие и сложность выполняемых приводом функций в ЭМС, МС системах обусловливает тесную взаимосвязь трех подсистем преобразования: вещества, энергии, информации. В то же время, среди перечисленных подсистем невозможно выделить главную, и второстепенную, представляющих в совокупности единую автоматизированную систему управления заданным процессом преобразования энергии.
В современных ЭМС, МС преобразование движения одного или нескольких тел в требуемые движения других тел осуществляется системой тел — исполнительными механизмами (ИМ). Механизмы входят в состав машин различных технических систем и предназначены для осуществления механических движений по преобразованию потоков энергии, силовых воздействий, формируемых приводами ЭМС, МС и необходимых для качественного выполнения заданных рабочих (технологических) процессов при функционировании ТС.
Создание нового образца МС обычно сопровождается использованием в разнообразных вариантах гибких технологических решений. Разновидностью этого принципа является модульный подход. Модули могут легко соединяться, образуя сложные технические системы, разъединяться, заменяться с целью формирования ТС с другими компонентами и техническими характеристиками при необходимости модернизации, ремонта. В общем случае модуль характеризуется конструктивной и технологической завершенностью, обладает строго фиксированными параметрами (функциональными характеристиками, геометрическими размерами), принадлежащими заранее установленным параметрическим типоразмерным рядам.
2. ОПИСАНИЕ РАБОЧЕЙ МАШИНЫ И ЕЕ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
2.1 Исходные данные для проектирования электропривода цепного транспортера
Объектом для проектирования электропривода является механизм с повторно-ратковременным режимом работы ( механизм подъема экскаватора, крана, механизм передвижения тележки или моста крана, механизм поворота экскаватора и т.п.). Нагрузка механизма изменяется в течение цикла, включает в себя разгон до рабочей скорости, выполнение работы на этой скорости, торможение или реверс и возвращение на повышенной скорости в исходное положение. В процессе работы механизма возникает необходимость регулирования скорости и момента, ограничения предельных значений момента, ограничения ускорения рабочего органа. Возникают режимы наброса и сброса нагрузки.
Исходными данными для проектирования электропривода являются:
– кинематическая схема рабочего органа с указанием вращающихся и поступательно движущихся динамических масс и усилий (моментов) сопротивления движению;
– скорости движения рабочего органа при различной загрузке с допускаемыми отклонениями от заданного значения;
– допускаемые значения ускорения рабочего органа по условиям механической прочности или условиям технологического процесса;
– время работы для выполнения технологической операции и число циклов в час;
– линейное перемещение (или угол поворота вала) РО;
– линейные (или предельные) жесткости соединительных валов РО;
– система электроснабжения участка (цеха), в котором работает механизм;
– условия окружающей среды (задымленность, вентиляция, влага и т.п.).
Грузовой лифт предназначен для подъёма груза с нижней площадки на верхнюю. Вниз клеть может спускаться как без груза, так и с грузом. Цикл работы лифта включает в себя времена подъёма и опускания клети, а также времена загрузки и выгрузки. Подъём клети происходит с установившейся скоростью Vр, а опускание – со скоростью Vв > Vр.
В процессе расчета необходимо определить наиболее загруженный для двигателя режим работы, обеспечить выполнение требований по ускорению лифта и возможность его работы с разными грузами на подъем и на спуск.
Кинематическая схема электропривода приведена на рисунке 1.
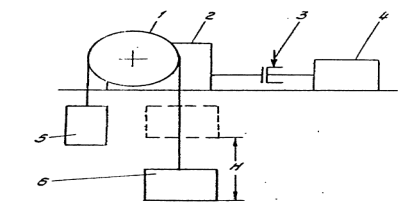
Рисунок 1 - Кинематическая схема электропривода грузового лифта:1 – канатоведущий шкив; 2 –редуктор; 3 – тормозной шкив; 4 – двигатель; 5 – клеть; 6 – противовес.
Технические данные транспортера (вариант 31) приведена таблице 1.
Таблица 1
| Параметр | Обозначение | Значение |
| Грузоподъемность, кг | mг | 5 |
| Масса клети, кг | mк | 6 |
| Масса противовеса, кг | mп | 9,5 |
| Диаметр канатоведущего шкива, м | D | 0,4 |
| Линейная жесткость, МН/м | Сл | 105 |
| Высота подъема клети, м | h | 8 |
| Скорость подъема клети, м/с | Vр | 0,25 |
| Скорость опускания, м/с | Vв | 0,35 |
| Допустимое ускорение, м/с² | а | 0,5 |
| Число циклов в час | z | 30 |
| Суммарное время работы, не более, с | tр | 85 |
3. РАСЧЕТ МОМЕНТОВ СТАТИЧЕСКИХ СОПРОТИВЛЕНИЙ И ПРЕДВАРИТЕЛЬНЫЙ РАСЧЕТ МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ
Расчет моментов при движении с грузом:
Масса всех движущихся частей: ![]()
Равновесная масса: ![]()
– момент сил трения в подшипниках

– момент трения качения
![]()
Статический момент рабочей машины равен:
![]()
Для определения динамических моментов рабочей машины рассчитываются моменты инерции рабочей машины (рабочего органа):

При заданной величине допустимого ускорения a для каждого режима рабочей машины определяются динамические моменты
![]()
Полный момент рабочей машины
- при пуске:
![]()
- при работе с установившейся скоростью:
![]()
- при торможении:
![]()
Нагрузочная диаграмма моментов рабочей машины представлена на рисунке 2.
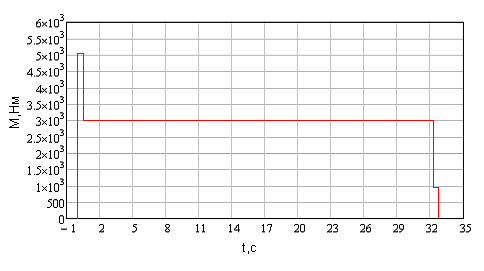
Рисунок 2 - Нагрузочная диаграмма моментов рабочей машины при движении с грузом
Расчет моментов при движении без груза:
Масса всех движущихся частей:
![]()
– момент сил трения в подшипниках

Статический момент рабочей машины равен:
![]()
Для определения динамических моментов рабочей машины рассчитываются моменты инерции рабочей машины (рабочего органа):

При заданной величине допустимого ускорения a для каждого режима рабочей машины определяются динамические моменты
![]()
Полный момент рабочей машины
- при пуске
![]()
- при работе с установившейся скоростью:
![]()
- при торможении:
![]()
Нагрузочная диаграмма моментов рабочей машины представлена на рисунке 2.
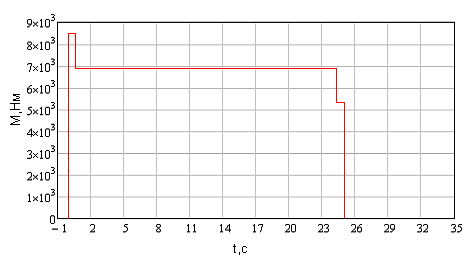
Рисунок 3 - Нагрузочная диаграмма моментов рабочей машины при движении без груза
На базе исходных данных рабочей машины рассчитывают и строят зависимости скорости рабочей машины от времени v(t). Участки различаются значениями статических нагрузок и моментов инерции. На основе заданных путей перемещения α, уcтановившейся скорости vy и допустимого ускорения a рассчитываем:
– время пуска tп до установившейся скорости с допустимым ускорением, торможения tт от установившейся скорости до остановки

При рабочем ходе:
При транспортировке:
![]()
– путь, проходимый за время пуска (торможения) рабочей машиной,
При рабочем ходе:
При транспортировке:
– время установившегося режима движения со скоростью v
При рабочем ходе:
При транспортировке:
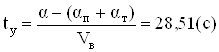
Нагрузочная диаграмма скорости рабочей машины приведена на рисунке 4.
Рисунок 4 - Нагрузочная диаграмма скорости рабочей машины
На основании построенной нагрузочной диаграммы момента рабочей машины можно рассчитать среднеквадратичное значение момента:
в котором учтены не только статические нагрузки, но и часть динамических нагрузок.
Фактическое значение относительной продолжительности включения ПВф
рассчитывается по длительности времени работы tk на всех m участках движения и заданному времени цикла
tц = 3600 / z = 51.429(с)
где z – число циклов работы машины в час:
ПВкат=40%
При этом мощность двигателя может быть определена по соотношению

4. ОБОСНОВАНИЕ ВЫБОРА РОДА ТОКА И ТИПА ЭЛЕКТРОПРИВОДА
Выбор рода тока и типа электропривода целесообразно производить на основе рассмотрения и сравнения технико-экономических показателей ряда вариантов, удовлетворяющих техническим требованиям данной рабочей машины. Электродвигатели постоянного тока допускается применять только в тех случаях, когда электродвигатели переменного тока не обеспечивают требуемых характеристик механизма либо не экономичны.
В зависимости от диапазона и плавности регулирования скорости, требований к качеству переходных процессов могут быть применены системы реостатного регулирования скорости, так и системы с индивидуальными преобразователями.
Для регулируемого привода задача выбора типа привода решается сложнее. В зависимости от диапазона и плавности регулирования скорости, требований к качеству переходных процессов могут быть применены как системы реостатного регулирования скорости, так и системы с индивидуальными преобразователями.
При глубоком регулировании скорости в большинстве случаев вопрос решается в пользу приводов постоянного тока. Однако конкурентными по своим свойствам являются приводы с частотным и частотно-токовым управлением. Преимущества приводов с асинхронными двигателями простота конструкции и повышенная надежность двигателей, возможность их изготовления в поточном производстве. Препятствием к быстрому внедрению частотно-регулируемых приводов является сложность систем управления, что приводит к недостаточной надежности их работы и повышенной стоимости. Появление на мировом рынке частотно регулируемых электроприводов с микропроцессорным управлением повышает ихнадежность, но стоимость их не снижается.
5. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ И ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНОГО ЧИСЛА РЕДУКТОРА
Для грузового лифта выбираем асинхронный двигатель с короткозамкнутым ротором, номинальные данные которого определены для повторно-кратковременного режима работы с продолжительностью включения 40%. Выбираем один двигатель, номинальная мощность которого не меньше расчетной номинальной мощности и наиболее близка к ней.
Выбираем двигатель 4MTКF(H)200L6. Данные выбранного двигателя приведены в таблице 2.
Таблица 2| Параметр | Обозначение | Значение |
| Мощность номинальная, кВт |
|
22 |
| Номинальная частота вращения, об/мин | nн | 935 |
| Номинальный ток (статора), А | Iн | 51 |
| Коэффициент мощности в номинальном режиме | cosφ | 0,79 |
| Пусковой ток, А | Iп | 275 |
| Пусковой момент, Нм | Мп | 706 |
| Максимальный (критический) момент | Ммакс | 760 |
| Активное сопротивление фазной обмотки статора, Ом | r1 | 0.235 |
| Ток холостого хода для номинального режима, А | I0 | 31,3 |
| Активное сопротивление короткого замыкания, Ом | Rкз | 0,5 |
| Индуктивное сопротивление короткого замыкания, Ом | Хкз | 0,63 |
| Коэффициент приведения сопротивлений | kr | 0,319 |
| Момент инерции двигателя, кгм2 (Нм) | Jдв | 0,57 |
Передаточное число редуктора определяется по номинальной скорости
вращения выбранного двигателя ωн и основной скорости движения исполнительного органа vо по формуле:
где D – диаметр колеса (ролика, шкива и т.п.), находящегося на выходном валу редуктора и преобразующего вращение вала в поступательное движение исполнительного органа рабочей машины.
Редуктор выбирают по справочнику , исходя из требуемого передаточного числа, заданного значения номинальной мощности (или моментов на тихоходном и быстроходном валу) и скорости выбранного двигателя с учетом характера нагрузки (режима работы) РО, для которого проектируется электропривод.
Выбираем трехступенчатый цилиндрический редуктор ЦТНД-400. Основные параметры приведены в таблице 3.
Таблица 3 – Основные параметры трехступенчатого цилиндрического редуктора ЦТНД-400
| Параметр | Обозначение | Значение |
| Номинальный крутящий момент на выходном валу, Нм | Мн | 8,7х103 |
| Передаточное число | n | 20 |
| КПД, % |
|
97 |
На этапе предварительного расчета мощности электродвигателя по заданным техническим показателям рабочей машины были рассчитаны статические и динамические моменты рабочей машины. После выбора двигателя и редуктора, когда известны передаточное число, коэффициент полезного действия КПД редуктора, рассчитываются статические моменты рабочей машины, к валу двигателя. Движение при рабочем ходе:
![]()
Движение при транспортировке:
![]()
С учетом потерь в редукторе статические моменты на валу рассчитывают в зависимости от режима работы электропривода. Статический момент на валу в двигательном режиме с грузом:
![]()
Статический момент на валу в двигательном режиме без груза:
![]()
При работе электропривода в тормозных режимах потери в редукторе вызывают уменьшение нагрузки двигателя.
Статический момент на валу в тормозном режиме с грузом:
![]()
Статический момент на валу в тормозном режиме без груза:
![]()
Номинальный момент на валу двигателя:
Суммарный приведенный к валу двигателя момент инерции системы может быть рассчитан по соотношению:
![]()
-при движении с грузом:
![]()
-при движении без груза:
![]()
Приведенный к валу двигателя суммарный момент инерции движущихся исполнительных органов рабочей машины и связанных с ними движущихся масс:
-при движении с грузом:

-при движении без груза:
В проекте допускается рассчитывать момент инерции электропривода приближенно, принимая в формуле коэффициент δ=1,3…1,5.
Приведенную к валу двигателя жесткость упругой механической связи Спр
определяют через значение крутильной жесткости рабочего вала (упругой муфты) через значение линейной жесткости – по формуле:
![]()
Установившаяся скорость двигателя:
При рабочем ходе:
![]()
При транспортировке:
Пусковые Мп и тормозные Мт моменты двигателя, при которых обеспечивается возможность разгона и торможения электропривода с заданным допустимым ускорением:
-при движении с грузом:
![]()
-при движении без груза:
![]()
Пусковой момент в двигательном режиме с грузом:
![]()
Пусковой момент в двигательном режиме без груза:
![]()
Тормозной момент в тормозном режиме с грузом:
![]()
Тормозной момент в тормозном режиме без груза:
![]()
Для приближенного расчета времени переходного процесса оцениваем
средний момент двигателя Мср:
Движение с грузом:
– при реостатном пуске
![]()
– при динамическом торможении
![]()
Движение без груза:
– при реостатном пуске
![]()
– при динамическом торможении
![]()
При питании от преобразователя с задатчиком интенсивности средний момент двигателя можно принять равным моменту, допустимому по ускорению: – при пуске М ср = М п; – при торможении М ср = М т;
7. ПРЕДВОРИТЕЛЬНАЯ ПРОВЕРКА ДВИГАТЕЛЯ ПО НАГРЕВУ И ПРОИЗВОДИТЕЛЬНОСТИ
Расчет времени переходных процессов:
![]()
Движение с грузом:
- при пуске
- при торможении
Движение без груза:
- при пуске
- при торможении
Расчет угла поворота вала двигателя за время переходного процесса
![]()
Движение с грузом:
- при пуске
![]()
- при торможении
![]()
Движение без груза:
- при пуске
![]()
- при торможении
![]()
Расчет времени работы с установившейся скоростью:
![]()
![]()
Движение с грузом:
Движение без груза:
Рассчитанные параметры приведены в таблице 4.
Таблица 4
|
Участок Движения |
Движение с грузом | Движение без груза | ||||
| пуск |
уст. режим |
тормо- жение |
пуск |
уст. режим |
тормо- жение |
|
| t, с | 0,5 | 31,26 | 0,5 | 0,7 | 22,33 | 0,7 |
| α, м | 0,06 | 7,88 | 0,06 | 0,122 | 7,756 | 0,122 |
| ν, м/c | 0,12 | 0,25 | 0.12 | -0,17 | -0,35 | -0.17 |
| Мрост, кН∙м | 2,99 | 2,99 | 2,99 | 6,897 | 6,897 | 6,897 |
| Jрост , кг∙м2 | 820,1 | 820,1 | 820,1 | 635,1 | 635,1 | 635,1 |
| Мродин, кН∙м | 2,05 | 0 | -2,05 | 1,588 | 0 | -1,588 |
| Мро, кН∙м | 5,04 | 2,99 | 0,9 | 8,486 | 6,897 | 5,31 |
| Мрc, Н∙м | 59,81 | 59,81 | 59,81 | 137,9 | 137,9 | 137,9 |
| Мвс, Н∙м | 61,65 | 58 | 142,2 | 133,8 | ||
| Мс, Н∙м | 61,65 | 58 | 142,2 | 133,8 | ||
| ωc, рад/с | 31,2 | 62,5 | 31,2 | 42 | 83,5 | 42 |
| Jпр, кг∙м2 | 0,328 | 0,328 | 0,328 | 0,25 | 0,25 | 0,25 |
| J, кг∙м2 | 37,81 | 37,81 | 37,81 | 42,34 | 42,34 | 42,34 |
| Мдин, Н∙м | 4726 | 4726 | 4726 | 5292 | 5292 | 5292 |
| Мдоп.уск, Н∙м | 536 | 536 | 536 | 536 | 536 | 536 |
| Мср, Н∙м | 2430,5 | 2334 | 2802,6 | 2579,1 | ||
| t, с | 0.5 | 31,74 | 0,52 | 0,67 | 23,6 | 0,73 |
| α, рад | 7,8 | 1984,1 | 8,1 | 14,1 | 1970,57 | 15,33 |
Предварительная проверка двигателя по нагреву осуществляется по величине
среднеквадратичного момента:
М доп=536(Н∙м); М доп*0.8=428,8(Н∙м)
Полученные значения показывают, что выбранный двигатель по нагреву подходит.
8. ВЫБОР ПРЕОБРАЗОВАТЕЛЯ ИЛИ СТАНЦИИ УПРАВЛЕНИЯ
Комплектный тиристорный электропривод включает в себя:
– электродвигатель;
–силовой трансформатор (или токоограничивающий реактор);
–силовой тиристорный преобразователь для питания двигателя, состоящий из силовых тиристоров с системой охлаждения, защитных предохранителей, разрядных, фильтрующих и защитных R, L, С - цепей;
–для привода постоянного тока тиристорный преобразователь для питания обмотки возбуждения при регулируемом магнитном потоке двигателя постоянного тока;
–систему импульсно-фазового управления, устройства выделения аварийного режима, контроля предохранителей и защиты от перенапряжений;
–коммутационную и защитную аппаратуру в цепях постоянного и переменного тока;
–сглаживающий реактор в цепи постоянного тока (при необходимости);
–устройство динамического торможения (при необходимости);
–шкаф высоковольтного ввода (при необходимости);
–систему управления электроприводом;
–комплект аппаратов, приборов и устройств, обеспечивающих оперативное управление, контроль состояния и сигнализацию электропривода;
–узлы питания обмотки возбуждения тахогенератора и электромеханического тормоза.
В проекте выбираются электродвигатель, силовой тиристорный преобразователь для питания двигателя, силовой трансформатор для питания преобразователя (или токоограничивающий реактор), сглаживающий реактор в цепи постоянного тока (при необходимости).
Питание двигателей постоянного тока предусматривается от преобразователей по трехфазной мостовой схеме выпрямления с раздельным управлением тиристорных групп. Условие выбора преобразователей Uнтп>=Uн; Iнтп >=Iн. Для проекта выбирается электропривод транзисторный регулируемый асинхронный Триол АТО5, технические данные которого приведены в таблице 5.
Таблица 5
| Параметр | Значение |
| Питающая сеть | 3х380 В( +10%, –15%) |
| Выходное напряжение | 3х ( 0…380 В )+ – 2% |
| Выходная частота | 0…400 Гц + – 0,05% |
| Ток перегрузки | 150% номинального значения в течение 60 с. |
| Коэффициент полезного действия | не менее 0,95. |
| Полная мощность, кВа | 28 |
| Номинальный ток нагрузки Iн, А | 45 |
Принципиальная схема электропривода приведена на рисунке 5.
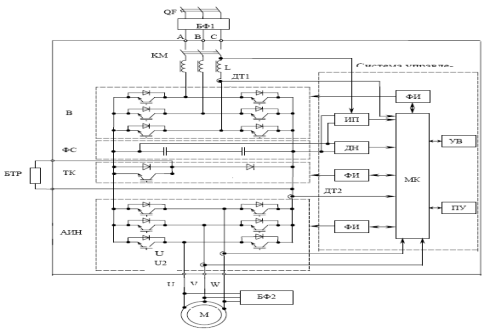
Рисунок 5 - Схема силовых цепей и функциональная схема управления электропривода АТО5
АИН – автономный инвертор напряжения;
ДТ – датчики тока;
М – асинхронный электродвигатель;
ИП – источник питания ( конвертор );
ДН – датчик напряжения;
ФИ – формирователь управляющих сигналов транзисторов (драйвер);
МК – микропроцессорный контроллер;
УВВ – устройство ввода / вывода ( внешний интерфейс );
ПУ – пульт управления.
9. СОСТАВЛЕНИЕ СТРУКТУРНОЙ СХЕМЫ ЭЛЕКТРОПРИВОДА И РАСЧЕТ ЕЕ ПАРАМЕТРОВ
9.1 Структурная схема механической части электропривода
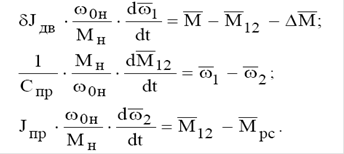
Механическая часть электропривода включает в себя движущиеся массы двигателя, передачи и рабочей машины. Структурные схемы механической части должны учитывать упругие связи и распределение моментов инерции между двигателем и рабочей машиной. Многомассовые упругие системы чаще всего сворачиваются в двухмассовые системы с присоединением малых маховых масс к звеньям механической части, обладающими большими маховыми массами, т.е. к ротору двигателя и рабочей машине. Дифференциальные уравнения, описывающие поведение двухмассовой упругой системы, без учёта диссипативных сил и зазоров в передаче, имеют вид:

Сделав необходимые преобразования, получим систему дифференциальных уравнений:
Коэффициенты при производных представляют собой постоянные времени:
– двигателя
– упругого звена
- рабочего органа
Структурная схема двухмассовой упругой системы приведена на рисунке 6.
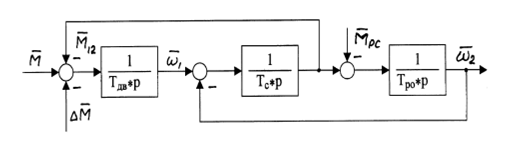
Рисунок 6 - Структурная схема двухмассовой упругой системы
Главные инерционные массы, представленные интегрирующими звеньями с постоянными времени Тдв и Тро, разделены интегрирующим звеном с постоянной времени Тс.
9.2 Структурная схема электромеханического преобразования энергии
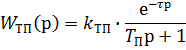
Математическое описание асинхронного двигателя при наличии шести обмоток на статоре и роторе с учётом их взаимного расположения, множества связей между ними, блоков произведения и нелинейностей достаточно сложно. В практике электропривода находят применение методы, в которых математическое описание упрощается за счёт различных допущений. Представление двигателя в виде эквивалентной двухфазной машины позволяет несколько упростить математическое описание и структурную схему асинхронного двигателя. Переход к упрощенной структурной схеме на основании записи уравнения момента двигателя М(s) в частных производных по напряжению питания, частоте и скорости оставляет нелинейные коэффициенты усиления. Для рассмотрения переходных процессов на рабочем участке механической характеристики возможно применение более простого соотношения между моментом и скоростью двигателя –формулы Пинчука И.С.
![]()
где β = 2*Мк / (ω0н*Sк) модуль жесткости линеаризованной механической характеристики.
Передаточная функция электромеханического преобразования энергии в асинхронном двигателе:
![]()
После преобразований структурная схема асинхронного двигателя для рабочего участка механической характеристики полностью повторяет структурную схему двигателя постоянного тока независимого возбуждения (см. рисунок 5).
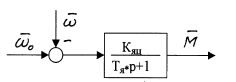
Рисунок 6 - Апериодическое звено
Для асинхронного двигателя
![]()
Пределы целесообразного использования полученных соотношений ограничиваются значениями момента – 0,8*Мк ≤ М < 0,8*Мк.
Если необходимо рассматривать работу асинхронного двигателя при больших скольжениях, при частотном регулировании скорости и момента в широких пределах следует обращаться к более сложному математическому описанию преобразования.
9.3 Структурные схемы электрических преобразователей энергии
Электрическое преобразование энергии выполняют различные устройства: тиристорные и транзисторные преобразователи переменного тока в постоянный, преобразователи частоты, широтно-импульсные преобразователи и пр., а также обычные резисторы, устанавливаемые в силовую цепь двигателя. Преобразователи электрической энергии используются в качестве регуляторов мощности, обеспечивая подачу на зажимы двигателя заданного напряжения или тока в зависимости от требований к электроприводу как в установившихся, так и в переходных режимах.
При питании силовой цепи двигателя от сети неизменного напряжения в качестве регулятора мощности применяют добавочные сопротивления в силовой цепи и релейно-контакторные станции управления для включения или выключения ступеней этих сопротивлений. Соответствующий подбор этих резисторов обеспечивает правильную пусковую диаграмму (реостатное регулирование момента) и требуемую скорость движения рабочего органа (реостатное регулирование скорости).
При питании двигателя постоянного тока от тиристорного преобразователя в силовую цепь дополнительно включаются активные и индуктивные сопротивления обмоток трансформатора (или токоограничивающего реактора) и сглаживающего реактора, в результате возрастают Rяц и Lяц и изменяются параметры структурной схемы Кяц и Тя.
Силовая часть тиристорного преобразователя относительно мгновенных значений входной и выходной координат представляет собой нелинейную импульсную систему, которая в полосе пропускания частот, ограниченной практически частотой сети, может рассматриваться как безынерционное звено с косинусоидальной зависимостью средней ЭДС Еd от угла открывания α. Фазовые сдвиги угла α относительно напряжения управления Uу вносит система импульсно-фазового управления.
Передаточная функция тиристорного преобразователя для линейного участка регулировочной характеристики Еd = f(Uу) имеет вид
Ктп = Еd / Uу коэффициент усиления преобразователя.
С целью упрощения расчётов на стадии выбора и расчёта элементов силовой части электропривода появляется возможность не учитывать инерционность ТП и представлять ТП безынерционным звеном с коэффициентом усиления Ктп. Учёт падения напряжения в элементах преобразователя при изменении нагрузки учитывается изменением параметров структурной схемы Кяц и Тя.
Всё приведенное выше относится к преобразователям частоты. Более того, в связи с тем, что в схеме ПЧ в контуре протекания токов включено большее число элементов (тиристоров, дросселей и т.п.), электрические данные которых на стадии проектирования неизвестны, а также учитывая наличие внутренних обратных связей в преобразователе, обеспечивающих поддержание заданного напряжения на выходе при изменении нагрузки, появляется возможность не учитывать падение напряжения внутри преобразователя (считать его внутреннее сопротивление равным нулю).
Таким образом, тиристорный преобразователь электрической энергии является безынерционным звеном с коэффициентом усиления Ктп.
Выходное напряжение и частота преобразователей формируется на их входе с помощью входных устройств. В настоящее время практически все преобразователи укомплектованы задатчиками интенсивности ЗИ с различными законами изменения управляющего напряжения.
Наиболее часто применяют интегральные ЗИ, обеспечивающие плавное линейное нарастание управляющего напряжения, и пропорционально-интегральные ЗИ, в котором совместно с интегральным каналом работает пропорциональный канал. Структурная схема ЗИ для участка линейного изменения напряжения на рисунке 7.
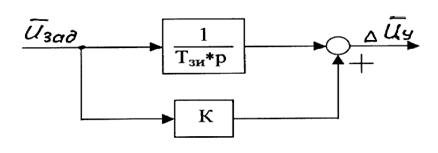
Рисунок 7 - Структурная схема ЗИ для участка линейного изменения напряжения
9.4 Структурные схемы электроприводов
Полная структурная схема электропривода включает в себя структурные схемы составных частей: механической части, электромеханического преобразователя энергии, электрического преобразователя и задающего устройства.
Структурная схема системы ПЧ – АД в общем виде сложна. Если допустить определённые ограничения (β = const, Мк = const и др.), то для настройки систем управления можно составить структурную схему для рабочего участка механической характеристики. Однако при таких допущениях возникают погрешности в расчётах электромеханического преобразования энергии. Отсутствуют способы расчета токов в цепях двигателя. Существенно искажаются показатели нагрева, так как для расчета приходится использовать метод эквивалентного момента, также искажаются энергетические показатели системы электропривода. Поэтому сложность структурной схемы ПЧ – АД зависит от задач, которые с её помощью нужно решать.
10. РАСЧЕТ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ЭЛЕКТРОПРИВОДА
10.1 Естественные характеристики асинхронного двигателя
Наиболее точной механической характеристикой асинхронного двигателя является каталожная зависимость М(S), и лишь при отсутствии каталожной зависимости приходится обращаться к приближенным расчетам.
При увеличении номинальной мощности Рн двигателя величина активного сопротивления статора снижается, а при Рн > 10 кВт можно пренебречь его величиной r1 ≈ 0. Тогда a = 0 , выражение механической характеристики (14.14) преобразуется к виду:
а выражение критического скольжения к виду:
![]()
где μк – перегрузочная способность асинхронного двигателя.
Момент потерь холостого хода асинхронного двигателя Мх рассчитать довольно сложно из-за отсутствия каталожных данных по сопротивлениям статора и ротора. Поэтому в расчетах асинхронного электропривода можно не учитывать момент потерь холостого хода (Мх ≈ 0), а электромагнитный момент в установившемся режиме принимать равным статическому моменту.
Электромеханические характеристики асинхронного двигателя – зависимости частоты вращения ротора ω от тока статора ω(I1) , от тока ротора ω(I2), от тока намагничивания ω(Iμ). Расчет этих зависимостей достаточно сложен, так как необходим учет сопротивлений статора и ротора и их изменений в зависимости от частоты токов ротора и статора. Также при расчете необходимо учитывать изменение сопротивления контура намагничивания с помощью кривой намагничивания. Чаще всего на стадии проектирования электропривода сопротивления обмоток и кривая намагничивания не известны.
С достаточной точностью для расчета электромеханических характеристик двигателя при питании от цеховой сети (напряжение постоянной амплитуды и частоты) можно использовать формулы профессора В.А.Шубенко. Эти формулы получены при не учете активного сопротивления статора (r1 = 0) и используют только каталожные данные двигателя. Ток холостого хода (ток намагничивания):
Ток статора
10.2 Расчет частоты и напряжения двигателя в системе ПЧ–АД при работе в заданной точке
При питании асинхронного двигателя от преобразователя частоты в процессе преобразования напряжения промышленной частоты в напряжение регулируемой амплитуды и регулируемой частоты возникают потери напряжения и мощности в преобразователе. Обычно такие преобразователи имеют внутренние обратные связи, и при изменении нагрузки двигателя выходное напряжение и частота практически не изменяются. Поэтому в дальнейшем напряжение и частоту на статоре двигателя будем считать независящими от нагрузки.
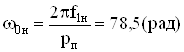
Синхронная скорость двигателя ω0 зависит от частоты питающей сети f1 и числа пар полюсов рn:
Для устойчивой работы двигателя необходимо при изменении частоты поддерживать перегрузочную способность двигателя, что обеспечивается регулированием напряжения на статоре по различным законам в зависимости от частоты и от характера изменения статического момента. Эти особенности необходимо учитывать при расчете частоты и амплитуды напряжения.
Частота напряжения в заданной точке:

10.3 Расчет частоты и тока статора двигателя в системе источник тока – асинхронный двигатель (ИТ-АД)
При работе двигателя в режиме частых пусков и торможений большое значение имеют условия формирования пусковых и тормозных моментов. Механические характеристики асинхронного двигателя при питании от преобразователя частоты, работающего в режиме автономного источника напряжения, существенно снижают критический момент в зоне малых частот. Здесь существенно влияет активное сопротивление обмотки фазы статора r1. Для увеличения момента в зоне малых частот приходится повышать напряжение на статоре.
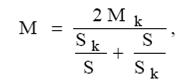
При питании статора двигателя от источника тока величина тока статора не зависит от нагрузки двигателя, а определяется лишь управляющим воздействием. Для предварительного расчета принимают Мкт =(2…3)Мзад, обеспечивая этим перегрузочную способность двигателя, и определяют величину тока статора
Механические характеристики строят по формуле
где
 ;
;
Характеристика M=f(S) приведена на рисунке 8.
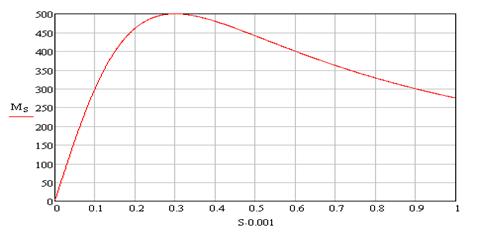
Рисунок 8 – Характеристика M=f(S) асинхронного двигателя
Механическая характеристика двигателя строится по 4 основным точкам (см. рисунок 9).
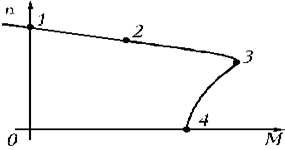
Рисунок 9 – Основные точки механической характеристики двигателя
Точка 1: n0 = (60 f) / p, Точка 2 с координатами nн и Мн. Номинальная частота вращения nн задается в паспорте. Номинальный момент рассчитывается по формуле:
Точка 3 с координатами Мкр nкр. nкр = n0 (1 - Sкр),
Точка 4 имеет координаты n=0 и М=Мпуск. Пусковой момент вычисляют по формуле Мпуск = Мн λпуск Механическая характеристика двигателя приведена на рисунке 10.
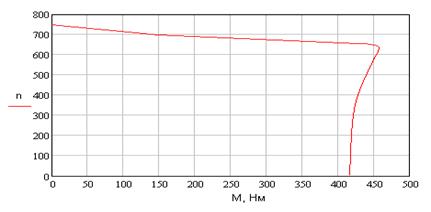
Рисунок 10 - Механическая характеристика асинхронного двигателя
10.4 Расчет параметров схем включения, обеспечивающих пуск и торможение двигателя
При питании двигателя от индивидуального преобразователя появляется возможность плавного регулирования напряжения (частоты), поэтому переходные процессы пуска и торможения обеспечиваются формированием напряжения управления преобразователем. В разомкнутой системе преобразователь – двигатель чаще всего применяют линейное нарастание напряжения управления, что определяет линейное нарастание напряжения (частоты) питания двигателя. В этом случае величина динамического момента двигателя определяется темпом нарастания напряжения, и, в конечном итоге, производной скорости идеального холостого хода двигателя во времени dω0 / dt.
В установившемся режиме нарастания скорости двигателя, когда затухают свободные составляющие переходного процесса,
![]()
а величина установившегося значения
динамического момента двигателя ![]() .
.
Для формирования линейного закона изменения напряжения управления на вход преобразователя подключают интегральный задатчик интенсивности ЗИ, выходное напряжение которого при подаче на его вход скачка задающего напряжения Uзад изменяется по линейному закону. При достижении величины Uзад нарастание напряжения на выходе ЗИ прекращается. Выходное напряжение ЗИ, таким образом, является управляющим напряжением преобразователя, а величина Uзад определяет установившуюся величину скорости ω0 двигателя. Темп нарастания скорости определяется величиной базовой постоянной времени ЗИ ТЗИ, численно равной времени достижения выходного напряжения преобразователя от нуля до базового значения Uн.
Базовая постоянная задатчика интенсивности:
Механическая постоянная времени:
Из полученных соотношений видно, что при различных моментах инерции J, величина TЗИ = const (см. рисунок 8).
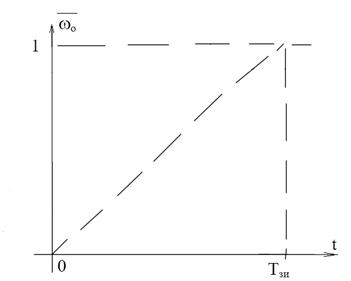
Рисунок 11 - К расчету параметров задатчика интенсивности
11. РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ И ПОСТРОЕНИЕ НАГРУЗОЧНЫХ ДИАГРАММ
11.1 Переходные процессы в двигателе
Переходные процессы электропривода возникают при изменении управляющих и возмущающих воздействий.
Расчёт переходных режимов необходим для:
– определения времени и характера их протекания;
– оценки их соответствия требованиям технологического процесса рабочего органа;
– оценки механических и электрических перегрузок;
– правильного выбора мощности двигателей, преобразователей и аппаратуры управления.
Нагрузочные диаграммы, построенные для переходных и установившихся режимов работы электропривода, дают возможность проверить выбранный двигатель по условиям заданной производительности, по нагреву, кратковременной перегрузке и условиям пуска. Они используются также для проверки по нагреву пусковых и тормозных резисторов, для проверки по допускаемым нагрузкам – тиристорных преобразователей.
Переходный процесс в механической части электропривода с идеально жесткими связями.
Расчёт нагрузочных диаграмм при пуске, торможении:
![]()
(при постоянном моменте инерции J) и уравнения механической характеристики двигателя
![]()
При питании от тиристорных преобразователей, когда переходные процессы формируются задатчиком интенсивности
![]()
где ω0нач–скорость холостого хода в начале переходного процесса при t = 0.
![]()
![]()
Жесткость механической характеристики электропривода
![]()
Движение без груза:
Электромеханическая постоянная времени электропривода
![]()
![]()
Переходный процесс ω(t) представлен на рисунке 12.
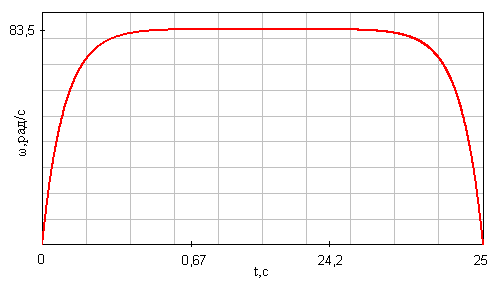
Рисунок 12 - Переходный процесс ω(t)
Переходный процесс М(t) представлен на рисунке 13.
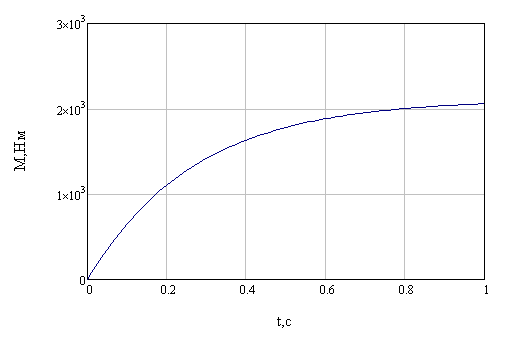
Рисунок 13 - Переходный процесс М(t)
Движение с грузом.
Переходный процесс ω(t) представлен на рисунке14.
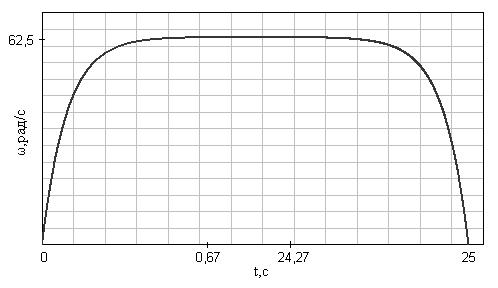
Рисунок 14 - Переходный процесс ω(t)
Переходный процесс М(t) представлен на рисунке 15.
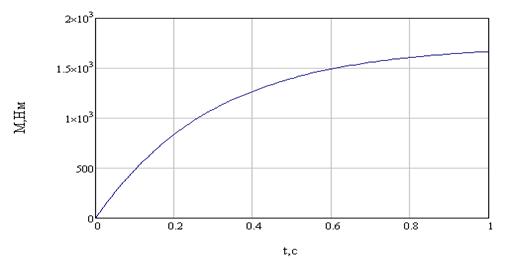
Рисунок 15 - Переходный процесс М(t)
![]()
![]()
11.2 Переходный процесс в механической части электропривода с упругими связями
Учёт упругих связей в механической части электропривода приводит к разделению вращающихся инерционных масс двигателя и рабочей машины включением между ними упругого элемента. В результате переходный процесс упругой системы описывается системой дифференциальных уравнений третьего порядка и уравнением механической характеристики двигателя. Если принять момент двигателя М =const и статический момент Мрс = const, а также не учитывать коэффициент затухания системы от действия диссипативных сил, уравнения нагрузочных диаграмм при нулевых начальных условиях примут вид:
![]()
В этих формулах:
![]()
Движение без груза.
![]()
Переходная характеристика приведена на рисунке 16.
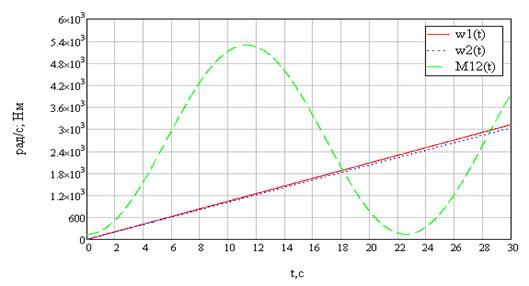
Рисунок 16 - Переходный процесс в механической части электропривода
За счёт колебаний упругого момента М12 максимальная нагрузка передач
увеличивается и может существенно превысить среднюю нагрузку, соответствующую жесткому приведенному звену:
![]()
Это превышение нагрузки оценивается динамическим коэффициентом:
Динамический коэффициент Кд является важной характеристикой условий работы механического оборудования и одним из основных показателей динамических качеств системы электропривода.
Движение с грузом.
Переходная характеристика приведена на рисунке 17.
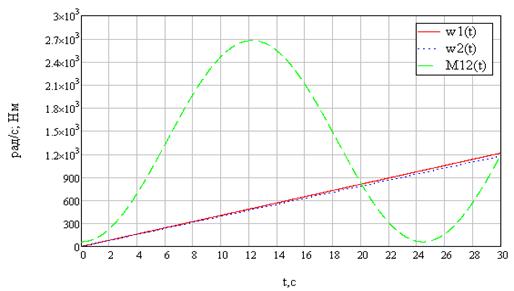
Рисунок 17 - Переходный процесс в механической части электропривода
![]()
11.3 Электромеханический переходный процесс
Учёт индуктивностей обмоток двигателя вызывает появление дополнительной (по отношению к механическому переходному процессу) электромагнитной инерционности в системе электропривода, заставляет анализировать изменение электромагнитной энергии в переходных процессах.
Электромеханический переходный процесс описывается (для жесткой механической системы) системой дифференциальных уравнений второго порядка. Нагрузочные диаграммы этого процесса могут быть рассчитаны по аналитическим выражениям [10,11] или интегрированием этих дифференциальных уравнений с помощью ЭВМ.
При питании двигателя от цеховой сети, когда в переходных процессах в силовую цепь включаются добавочные резисторы, влияние электромагнитной инерции снижается. Необходимость учёта Тэ возникает при расчёте переходных процессов, когда добавочные резисторы отсутствуют и двигатель работает на естественной характеристике.
Влияние электромагнитной инерции существенно проявляется при отношении (Тм / Тэ) < 2 [1], где Тм = J / β электромеханическая постоянная времени электропривода, Тэ = LΣ / RΣ электромагнитная постоянная времени силовой цепи.
Уравнения нагрузочных диаграмм в общем виде для Тм / Тэ < 4 имеют вид
![]()
![]() ,
,
где
С помощью приведенных уравнений можно рассчитать переходные процессы пуска, особенно переход на естественную характеристику, а также торможение.
Движение с грузом
Электромеханический переходной процесс при движении с грузом приведен на рисунке 18.
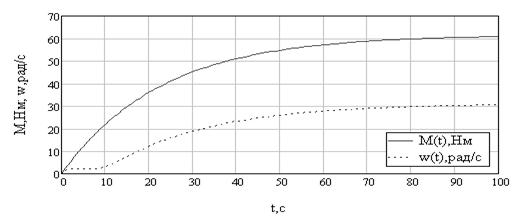
Рисунок 18 - Электромеханический переходной процесс при движении с грузом
Движение без груза
Электромеханический процесс при движении с грузом приведен на рисунке 19.
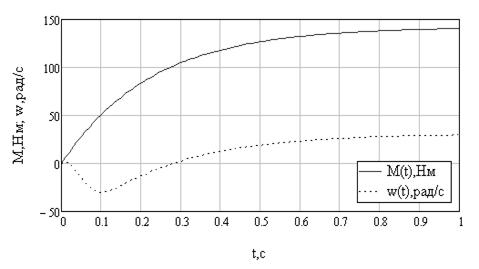
Рисунок 19 - Электромеханический переходной процесс при движении без груза
12. РАСЧЕТ ЭНЕРГЕТИЧЕСКИХ ПОКАЗАТЕЛЕЙ ЭЛЕКТРОПРИВОДА
Энергетические показатели электропривода характеризуют экономичность преобразования энергии системой электропривода (коэффициент полезного действия) и экономичность потребления энергии от сети (коэффициент мощности).
Для электропривода, работающего в повторно-кратковременном режиме работы, универсальной оценкой энергетических показателей является их средневзвешенные значения за цикл работы (цикловые значения). Мгновенные значения КПД и cosϕ могут характеризовать экономичность работы электропривода только в установившихся режимах работы. Цикловой КПД представляет собой отношение произведенной механической работы за цикл А к потребленной за это время электроэнергии (активной энергии) из сети Р:
![]()
![]()
Для оценки циклового КПД следует брать отрезки времени, началу и концу которых соответствует одинаковая энергия, запасенная в элементах привода. Механическая энергия за время переходного процесса определяется по соотношению:
![]()
Активная энергия из сети:
![]()
Реактивная энергия из сети:
![]()
13. ВЫБОР ПУСКОВЫХ И ТОРМОЗНЫХ РЕЗИСТОРОВ И ПРОВЕРКА ИХ ПО НАГРЕВУ
Выбор резисторов для силовых цепей двигателя производится на основе данных электрического расчёта их величин (см. п.17.1, 18) и нагрузочных диаграмм токов.
Сначала по величине сопротивлений пусковых и тормозных резисторов выбираются ящики резисторов, как правило, с фехралевыми ленточными или проволочными элементами [3, 24].
В качестве продолжительного тока резисторов Iпр на предварительном этапе принимается средняя величина за цикл среднеквадратичного значения тока силовой обмотки за время включенного состояния резистора:
По величине продолжительного тока выбирают конкретный ящик (номер ящика). Подбирается схема соединения элементов, обеспечивающая требуемую величину сопротивления каждой ступени резисторов. Затем производится проверка выбранных резисторов по нагреву, которая сводится к определению эквивалентного тока и сравнению его с допустимым продолжительным током. Методика проверки выбранных резисторов по нагреву приведена в [3]. Проверка может быть выполнена не для каждого, а лишь для наиболее загруженного по эквивалентному току элемента в каждой секции.
Для определения эквивалентного тока резисторов используют данные расчета нагрузочной диаграммы тока двигателя с учетом времени обтекания током рассматриваемой секции и доли тока двигателя, проходящего через каждый элемент (при параллельном соединении элементов). Превышение эквивалентного тока над продолжительным недопустимо. Однако чрезмерный запас выбранных резисторов по нагреву также недопустим, так как влечёт за собой неоправданное завышение числа ящиков резисторов и стоимости установки.
Для каждой ступени пусковой и тормозной схемы в проекте должны бытьприведены значения требуемых и выбранных сопротивлений резисторов и указаны различия между ними.
В графической части проекта приводится схема соединения элементов во всех выбранных ящиках резисторов между собой, соединения с обмотками двигателя и подключения к коммутирующим аппаратам.
В результате проектирования был разработан автоматизированный электропривод грузового лифта, обеспечивающий заданную скорость и ускорение подьема и опускания при повторно-кратковременном режиме работы. Исследованы и проанализированы переходные процессы при различных режимах работы системы.
Спроектированная система удовлетворяет всем поставленным требованиям.
1. Драчев Г.И. Теория электропривода: Учебное пособие к курсовому проектированию для студентов заочного обучения спец. 180400. 2-е издание, дополненное. Челябинск: Изд. ЮУрГУ, 2002. – 137 с.
2. Интернет-ресурсы.
© 2009 База Рефератов