
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по цифровым устройствам
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Курсовая работа: Расчет и проектирование автоматической системы технологического оборудования для обработки оси
Курсовая работа: Расчет и проектирование автоматической системы технологического оборудования для обработки оси
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
ДОНЕЦКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Механический факультет
Кафедра МС
КУРСОВАЯ РАБОТА
По дисциплине: «Теория проектирования автоматизированных станочных комплексов»
На тему: «Расчет и проектирование автоматической системы технологического оборудования для обработки оси»
Выполнила
студента группы МС-02а И. С. Каракуц
Проверил
д. т. н. Л. П. Калафатова
Нормоконтроллер, Ю.А. Гринев
ДОНЕЦК 2006
Исходные данные
1. Чертеж детали (Приложение А)
2. Базовый технологический процесс обработки детали
3.
Заданная сменная производительность ![]() шт/смену
шт/смену
РЕФЕРАТ
Курсовая работа содержит: 26 с., 8 табл., 4 рис., 6 источников, 2 приложений.
В данной курсовой работе рассматривается процесс проектирования автоматической линии технологического оборудования, которая позволила бы при минимальных затратах добиться заданной производительности.
Цель работы: спроектировать оптимальную структурно компоновочную схему автоматической линии для условий серийного производства детали «Ось». Реализовать структурную схему на практике, выбрав конкретное технологическое оборудование; описать ее работу с помощью циклограммы.
Курсовая работа включает: пояснительную записку, которая содержит все необходимые сведения о проектировании автоматической линии; чертеж компоновки автоматической линии с обозначением всех позиций; циклограмма работы автоматической линии.
АНАЛИЗ, ПРОИЗВОДИТЕЛЬНОСТЬ, РОБОТ, ТРАНСПОРТНАЯ СИСТЕМА, АТОМАТИЧЕСКАЯ ЛИНИЯ, ЭКОНОМИЧЕСКИЕ ПОКАЗАТЕЛИ, ЦИКЛОГРАММА
СОДЕРЖАНИЕ
1 ТЕХНОЛОГИЧЕСКАЯ ПОДГОТОВКА
1.1 Анализ конструкции детали на технологичность
1.2 Разработка маршрутного технологического процесса
1.3 Выбор режимов резания и расчет технологической производительности
1.4 Перечень холостых операций при реализации технологического процесса
1.5 Определение требуемой производительности
2 ОПРЕДЕЛЕНИЕ РАЦИОНАЛЬНОЙ СТРУКТУРЫ СИСТЕМЫ ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ
3 РОБОТИЗИРОВАННЫЕ КОМПЛЕКСЫ
4 РАСЧЕТ ЭКОНОМИЧЕСКИХ ПОКАЗАТЕЛЕЙ
ВЫВОД
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. ТЕХНОЛОГИЧЕСКАЯ ПОДГОТОВКА
1.1 Анализ конструкции детали на технологичность
Деталь ось – типа вал (см. Приложение А).
Деталь изготовлена из стали 40Х ГОСТ 4543-41.
Это конструкционная легированная сталь, хорошо обрабатываемая резанием, имеющая следующий химический состав и механические свойства:
C = 0.36-0.44 %; Si = 0.17-0.37
%; Mn = 0.50-0.80 %; Cr = 0.80-1.10 %; Ni = 0.3 %; Cu = 0.3 %; P= 0.035 %; S=
0.035 %; ![]() =
610 МПа;
=
610 МПа; ![]() = 395 МПа;
= 395 МПа;
В процессе обработки детали, она подвергается объемной закалке до твердости HRC 38…42.
На чертеже представлены все необходимые виды и размеры, чтобы уяснить конструкцию детали. Конструкция детали предельно простая, и в упрощениях не нуждается.
Деталь является нежесткой, так как длина больше 10 диаметров.
Все поверхности детали доступны для непосредственного измерения. Заменить конструкцию детали сборной является нецелесообразным. Точность размеров и параметры шероховатости соответствующих поверхностей увязаны между собой. Получение допуска и шероховатости не вызывает особых технологических трудностей. Нетехнологичных поверхностей на детали, на мой взгляд, нет. Все требования стандартов при проектировании данной детали были выдержаны.
К легко повреждаемым поверхностям можно отнести наружную резьбу М20×1,5.
Конструкция детали позволяет использовать высокопроизводительное оборудование, стандартные инструменты и оснастку на всех операциях.
Таким образом, будем считать, что изделие технологично.
Конструкция детали позволяет использовать высокопроизводительное оборудование, стандартные инструменты и оснастку на всех операциях кроме сверления осевого и радиального отверстия.
Деталь в целом технологична.
1.2 Разработка маршрутного технологического процесса
В условиях неавтоматизированного производства при разработки маршрутного технологического процесса нужно руководствоваться следующими правилами:
1) С целью экономии труда и времени технологической подготовки производства использовать типовые процессы обработки детали и типовых поверхностей деталей;
2) Не проектировать обработку на уникальных станках. Применение уникальных и дорогостоящих станков должно быть технологически и экономически оправдано;
3) Использовать по возможности только стандартный режущий и измерительный инструмент;
4) Стремиться применять наиболее совершенные формы организации производства: непрерывные и групповые поточные линии, групповые технологические процессы и групповые наладки на отдельные станки;
5) Обрабатывать наибольшее количество поверхностей данной детали за одну установку.
Маршрутный технологический процесс обработки детали «Ось» в условиях неавтоматизированного производства.
005 Заготовительная
010 Фрезерно-центровальная (Станок фрезерно-центровальный, призмы, прихваты, торцовые фрезы, центровые свёрла, базы: Æ38, Æ38, торец Æ48)
А Установить и снять заготовку
1. Фрезеровать торцы детали
2. Сверлить центровые отверстия
015 Токарная с ЧПУ (станок токарный с ЧПУ, центр и трехкулачковый самоцентрирующий патрон, проходной упорный резец, базы: ось и торец)
А Установить и снять заготовку
1. Точить поверхность 7 под люнет.
020 Токарная с ЧПУ (станок токарный с ЧПУ, центра и инерционный патрон, люнет, проходной упорный резец, базы: ось и торец)
А Установить и снять заготовку
1. Точить поверхность 2, точить
поверхность 4 предварительно,
точить поверхность 6 предварительно, точить поверхность 10,
точить поверхность 8, точить поверхность 25, точить поверхность 9
(до левого) между
бортиками последовательно.
Б Переустановить заготовку
2 Точить поверхность 1, точить
поверхность 3 предварительно,
точить поверхность 5 предварительно, точить поверхность 24,
точить поверхность 9 между бортиками (до правого)
последовательно.
025 Токарная с ЧПУ (станок токарный с ЧПУ, центра и инерционный патрон, люнет, проходной упорный резец, канавочный резец, резец для нарезания резьбы, базы: ось и торец)
А Установить и снять заготовку
1.Точить поверхность 1 окончательно, точить поверхность 18, точить поверхность 3 окончательно, точить поверхность поверхность 21, точить поверхность 5 окончательно, точить поверхность 22 последовательно.
2. Точить поверхность 11, точить поверхность 13.
3. Нарезать резьбу на поверхности 1.
Б Переустановить заготовку
4. Точить поверхность 2 окончательно, точить поверхность 19, точить поверхность 4 окончательно, точить поверхность поверхность 20, точить поверхность 6 окончательно, точить поверхность 23 последовательно.
5. Точить поверхность 12, точить поверхность 14.
6. Нарезать резьбу на поверхности 2.
030 Вертикально-фрезерная (станок вертикально-фрезерный, призмы и прихваты, торцовая фреза, базы: Æ35, Æ35, торец Æ45)
А Установить и снять заготовку
1. Фрезеровать лыску 17 на диаметре,
выдерживая размеры Æ60
и
245 мм
035 Радиально-сверлильная (Станок радиально-сверлильный, призмы и прихват, кондуктор, сверло, базы: Æ35, Æ35, торец Æ45)
А Установить и снять заготовку
1. Сверлить отверстие 16
Б Переустановить заготовку
2. Сверлить отверстие 15
040 Слесарная (стол слесарный)
А Установить и снять заготовку
Калибровать резьбу дважды, зачистить заусенцы после фрезеровки
045 Термообработка
1. Калить HRC 38…42
050 Круглошлифовальная (станок круглошлифовальный, поводковый центр, центры, абразивный круг, центровые отверстия)
А Установить и снять заготовку
1. Шлифовать 3 предварительно
2. Шлифовать 3 окончательно.
Б Переустановить заготовку
1. Шлифовать 4 предварительно
2. Шлифовать 4 окончательно.
Так как технические требования чертежа предполагают термическую обработку, продолжительность которой по времени заведомо превышает все остальные операции в несколько раз, из базового техпроцесса, который в дальнейшем используется для выбора технологического оборудования автоматической линии, необходимо исключить термическую обработку и все последующие операции. В соответствие с указанными рекомендациями и наложенными ограничениями разработан маршрутный техпроцесс по производству оси.
1.3 Выбор режимов резания и расчет технологической производительности
Выбор режимов резания осуществляется в соответствии с общемашиностроительными нормативами для технического нормирования работ на металлорежущих станках. Результаты расчетов занесены в таблицу 1.1.
Таблица 1.1 – Расчет машинного времени выполнения операций
| Операция | Наименование переходов | Инструмент | Глубина резания, мм | Режим обработки | D,мм | L, мм |
tр, мин |
||
| Подача | Скорость резания | Число оборотов в минуту | |||||||
| Токарная | Точение наружной пов-ти 1 и2 | Резец упорный проходной Т5К10 | 4,8 | 0,35 | 125 | 2000 | 40 | 24 | 0,068*2=0,137 |
| Точение наружной пов-ти 3 и 4 | 2 | 0,4 | 110 | 1000 | 40 | 80 | 0,2*2=0,4 | ||
| Точение наружной пов-ти 5 и 6 | 2,8 | 0,5 | 113 | 800 | 51 | 27 | 0,0675*2=0,135 | ||
| Точение наружной пов-ти 10 | 3 | 0,6 | 116 | 500 | 81 | 192 | 0,64 | ||
| Точение наружной пов-ти 7 | 4 | 0,6 | 102 | 500 | 81 | 142 | 0,946 | ||
| Точение наружной пов-ти 8 | 2,5 | 0,6 | 102 | 500 | 75 | 62 | 0,413 | ||
| Точение фаски 1´45° - 24, 25 | 1 | 0,6 мм/мин | 102 м/мин | 500 об/мин | 60 | 1 | 0,003*2=0,006 | ||
| Точение наружной пов-ти 9 | 2,5 | 0,6 | 102 | 500 | 75 | 112 | 0,746 | ||
| Токарная | Точение наружной пов-сти 1 и2 чистовое (Æ 20) | Резец упорный проходной Т15К6 | 0,4 | 0,25 мм/об | 180м/мин | 2800 об/мин | 46 | 24 | 0,034*2=0,068 |
| Точение фаски 1´45° - 18, 19 | Резец упорный проходной Т15К6 | 1 | 0,25 мм/мин | 168 м/мин | 2800 об/мин | 20 | 1 | 0,0014*2=0,0028 | |
| Точение канавки 11 и 12 | Резец канавочный Т15К6 | 1,1 | 0,16 мм/об | 110 м/мин | 1000 об/мин | 20 | 1,1 | 0,0068*2=0,0136 | |
|
Точение наружной
пов-сти 3 и 4 чистовое |
Резец упорный проходной Т15К6 | 0,5 | 0,25 мм/об | 110м/мин | 1600 об/мин | 46 | 80 | 0,2*2=0,4 | |
| Точение фаски 1´45° - 20, 21 | Резец упорный проходной Т15К6 | 1 | 0,25 мм/мин | 168 м/мин | 1600 об/мин | 35 | 1 | 0,0025*2=0,005 | |
|
Точение Канавки на пов-ти 13 и 14 |
Резец канавочный Т15К6 | 0,25 | 0,16 мм/об | 62 м/мин | 1000 об/мин | 35 | 0,25 | 0,0015*2=0,003 | |
| Точение наружной пов-сти 5 и 6 чистовое | Резец упорный проходной Т15К6 | 0,3 | 0,25 мм/об | 138 м/мин | 1260 об/мин | 36 | 27 | 0,085*2=0,17 | |
| Точение фаски 3´15° - 22, 23 | Резец упорный проходной Т15К6 | 0,8 | 0,25 мм/мин | 168 м/мин | 1260 об/мин | 45 | 3 | 0,009*2=0,019 | |
| Сверлильная | Сверлить отв. Æ 4 мм 15, 16 | Сверло Р6М5 | 2 | 0,1 мм/об | 26,1 м/мин | 2000 об/мин | 4 | 24 | 0,12*2= 0,24 |
| Фрезерная | Фрезеровать лыску 17 | Фреза торцевая ВК8 | 5 | 0,15 мм/зуб | 62 м/мин | 315 об/мин | 80 | 255 | 0,85 |
|
|
5,19 | ||||||||
Рассчитаем технологическую производительность:
![]() , (1)
, (1)
где
![]() -
машинное время выполнения всех операций.
-
машинное время выполнения всех операций.
![]() (шт/мин).
(шт/мин).
1.4 Перечень холостых операций при реализации технологического процесса
Для выполнения этого этапа определим все холостые операции, которые необходимо выполнить для реализации всех рабочих операций. Холостые операции содержат действия, которые связаны с ориентацией заготовки в пространстве, подачу заготовки в рабочую зону, закрепление ее на рабочей позиции, и т.д. Результаты выбора холостых операций оформляем в таблицу 1.2.
Таблица 1.2 – Перечень холостых операций, необходимых для выполнения рабочих операций ТП
| Наименование рабочей операции | Наименование холостой операции |
| 1. Токарная с ЧПУ (черновая): точить 2, 4, 6, 8, 9, 10, 25 |
1.1 Ориентация детали 1.2 Подача детали в рабочую зону 1.3 Закрепление детали 1.4 Подвод резца на быстром ходу 1.5 Отвод резца на быстром ходу 1.6. Раскрепление детали 1.7. Извлечение детали из рабочей зоны |
| 2. Токарная с ЧПУ (черновая): точить 1, 3, 5, 9, 24 |
2.1 Ориентация детали 2.2 Подача детали в рабочую зону 2.3 Закрепление детали 2.4 Подвод резца на быстром ходу 2.5 Отвод резца на быстром ходу 2.6. Раскрепление детали 2.7. Извлечение детали из рабочей зоны |
| 3. Токарная с ЧПУ (чистовая): точить 1, 18, 3, 21, 5, 22, 11, 13; нарезать резьбу 1 |
4.1 Ориентация детали 4.2 Подача детали в рабочую зону 4.3 Закрепление детали 4.4 Поворот револьверной головки 4.5 Подвод резца на быстром ходу 4.6 Отвод резца на быстром ходу 4.7 Поворот револьверной головки 4.8 Подвод резца на быстром ходу 4.9 Отвод резца на быстром ходу 4.10 Поворот револьверной головки 4.11 Подвод резца на быстром ходу 4.12 Отвод резца на быстром ходу 4.13 Раскрепление детали 4.14 Извлечение детали из рабочей зоны |
| 4. Токарная с ЧПУ (чистовая): точить 2, 19, 4, 20, 6, 23, 12, 14; нарезать резьбу 2 |
4.1 Ориентация детали 4.2 Подача детали в рабочую зону 4.3 Закрепление детали 4.4 Поворот револьверной головки 4.5 Подвод резца на быстром ходу 4.6 Отвод резца на быстром ходу 4.7 Поворот револьверной головки 4.8 Подвод резца на быстром ходу 4.9 Отвод резца на быстром ходу 4.10 Поворот револьверной головки 4.11 Подвод резца на быстром ходу 4.12 Отвод резца на быстром ходу 4.13 Раскрепление детали 4.14 Извлечение детали из рабочей зоны |
| 4. Радиально-сверлильная сверлить отверстия Æ4 |
7.1 Ориентация детали 7.2 Подать деталь в рабочую зону 7.3 Закрепить деталь 7.4 Подвести шпиндель на быстром ходу 7.5 Отвести шпиндель на быстром ходу 7.6 Переместить траверсу для сверления второго отверстия 7.7 Раскрепить деталь 7.8 Удалить деталь из рабочей зоны |
| 5. Вертикально-фрезерная - фрезеровать лыску |
5.1. Ориентация детали 5.2. Подача детали в рабочую зону 5.3. Закрепление детали 5.4. Подвод фрезы на быстром ходу 5.5. Отвод фрезы на быстром ходу 5.6. Раскрепление детали 5.7. Извлечение детали из рабочей зоны |
1.5 Определение требуемой производительности
Определение требуемой производительности в условиях неавтоматизированного производства определяется по формуле:
![]() ,
(2)
,
(2)
где ![]() - производительности в условиях неавтоматизированного производства,
шт/смену;
- производительности в условиях неавтоматизированного производства,
шт/смену;
![]() - время выполнения холостых операций,
- время выполнения холостых операций, ![]() .
.
![]() (шт/смену)
(шт/смену)
2 ОПРЕДЕЛЕНИЕ РАЦИОНАЛЬНОЙ СТРУКТУРЫ СИСТЕМЫ ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ
При обработке на автоматической линии детали «Ось» технологический процесс дифференцируется на составные части, которые выполняются в разных позициях на разных станках. В процессе обработки – от заготовки к готовой продукции изделие передается последовательно из позиции в позицию, где получает заданный объем технологического воздействия таким образом, что на каждой позиции выполняется лишь определенная часть обработки. При этом принятые методы, маршрут и режимы обработки, технологические базы и режущий инструмент должны обеспечить выполнение заданных требований качества (точность размеров, шероховатость поверхности и др.).
Число вариантов построения автоматической линии
определяется диапазоном между минимальным и максимальным числом рабочих позиций
в линии ![]() .
Минимальное число позиций определяется технологическими возможностями
оборудования, что используется. Максимальное число позиций лимитируется
необходимостью удовлетворять требованиям качества и точности обработки.
.
Минимальное число позиций определяется технологическими возможностями
оборудования, что используется. Максимальное число позиций лимитируется
необходимостью удовлетворять требованиям качества и точности обработки.
При определении структуры автоматической линии необходимо проанализировать все возможные варианты и для анализа выбрать те, которые обеспечивают заданную производительность.
Разработка вариантов технологического процесса в автоматезированом производстве:
Вариант №1.

Рисунок 2.1 – Структурный вариант АЛ из 6 рабочих позиций
Лимитирующей позицией является черновая обработка, для которой tр=3,26 мин. Производим укрупненный расчет цикловой производительности QЦ для данного варианта по формуле:
![]() деталей/смена,
деталей/смена,
где tр(q) - время машинной обработки на лимитирующей позиции, мин;
![]() - время несовмещенных вспомогательных
ходов цикла;
- время несовмещенных вспомогательных
ходов цикла;
Кисп=0,75 – ожидаемый коэффициент использования АЛ.
Вариант 2

Рисунок 2.2 – Структурный вариант АЛ из 9 рабочих позиций
Лимитирующей позицией является черновая обработка с другой стороны детали, для которой tр=2,81 мин.
![]() деталей/смена.
деталей/смена.
Вариант 3

Рисунок 2.3 – Структурный вариант АЛ из 14 рабочих позиций
Лимитирующей позицией является черновая обработка Æ65 при L=140 мм., для которой tр=1,893 мин.
![]() деталей/смена.
деталей/смена.
Вариант 4

Рисунок 2.4 – Структурный вариант АЛ из 10 рабочих позиций со станком дублером
Лимитирующей позицией является черновая обработка Æ65 при L=110 мм., для которой tр=1,493 мин.
![]() деталей/смена.
деталей/смена.
Таким образом, вариант №4 обеспечивает заданную производительность АЛ.
Вариант 1
1.
Станок – полуавтомат:
точить поверхности 10 (![]() ), 8 (
), 8 (![]() ), 2 (
), 2 (![]() ).
).
2.
Станок
полуавтомат: точить поверхности 8 (![]() ), 6 (
), 6 (![]() ), 4 (
), 4 (![]() ), 2 (
), 2 (![]() ); точить фаску 25 (
); точить фаску 25 (![]() ).
).
3.
Стонок
полуавтомат: точить поверхности 7 (![]() ), 3 (
), 3 (![]() ), 1 (
), 1 (![]() ); точить канавки шириной 10 мм на поверхности 9.
); точить канавки шириной 10 мм на поверхности 9.
4.
Станок – полуавтомат:
точить поверхности 1 (![]() ), 5 (
), 5 (![]() ), 7 (
), 7 (![]() ); точить фаску 24 (
); точить фаску 24 (![]() ).
).
5.
Станок
полуавтомат: чистовое точение поверхностей 2 (![]() ), 4 (
), 4 (![]() ), 6 (
), 6 (![]() ), точить канавки 12 (
), точить канавки 12 (![]() ), точить фаску
20 (
), точить фаску
20 (![]() ),
точить канавку 14 (
),
точить канавку 14 (![]() ),точить фаску 23 (
),точить фаску 23 (![]() ), и фаску 19 (
), и фаску 19 (![]() ).
).
6.
Станок
полуавтомат: чистовое точение поверхностей 1 (![]() ), 3 (
), 3 (![]() ), 5 (
), 5 (![]() ), точить канавку 11 (
), точить канавку 11 (![]() ), точение
фасок
), точение
фасок
7.
21 (![]() ), точить
канавку 13 (
), точить
канавку 13 (![]() ),
точить фаску 22 (
),
точить фаску 22 (![]() ) и фаску 18 (
) и фаску 18 (![]() ).
).
8.
Станок
полуавтомат: продольное точение поверхности 9 (![]() ).
).
9.
Станок
агрегатный: сверление отверстий 15, 16 (![]() ); фрезерование лыски 17 (
); фрезерование лыски 17 (![]() ).
).
Лимитирующей
позицией является агрегатная операция 8, для которой ![]() мин (
мин (![]() деталей/смен).
деталей/смен).
Уточненный расчет полной производительности выполним по формуле:
где Кзаг=0.75 – коэффициент загрузки линии как характеристика технических и организационных условий ее эксплуатации;
![]() - время несовмещенных вспомогательных
ходов цикла;
- время несовмещенных вспомогательных
ходов цикла;
∑tр суммарные собственные внецикловые затраты (простой на единицу продукции), мин/шт.
Внецикловые затраты определяются по формуле:
![]() ,
,
где ∑tин – ожидаемые суммарные внецикловые затраты по инструменту;
∑tос ожидаемые усредненные внецикловые затраты по оснащению.
Затраты времени из-за выхода из строя инструмента определяются по формуле:
![]()
где tр – машинное время выполнения составной операции конкретным инструментом, мин;
Т нормативная стойкость инструмента, мин;
tз время, необходимое для замены инструмента при его износе, мин;
tпр средняя продолжительность простоев из-за случайных сбоев в работе и поломок инструмента, которые приходятся на период его стойкости, мин.
Значение tз и tпр для разных типов инструментов занесены в таблицу 2.1.
Таблица 2.1 – Расчет времени потерь по инструменту
| № Опер. | Инструмент |
|
|
( |
|
| 1 | Резец упорный проходной Т5К10 | 0,64 | 60 | 1,7 | 0,0181 |
| 2 | Резец упорный проходной Т5К10 | 0,21 | 60 | 1,7 | 0,0059 |
| 3 | Резец упорный проходной Т5К10 | 0,034 | 60 | 1,7 | 0,0009 |
| 4 | Резец упорный проходной Т5К10 | 0,21 | 60 | 1,7 | 0,0059 |
| 5 | Резец упорный проходной Т5К10 | 0,0675 | 60 | 1,7 | 0,0019 |
| 6 | Резец упорный проходной Т5К10 | 0,2 | 60 | 1,7 | 0,0057 |
| 7 | Резец упорный проходной Т5К10 | 0,034 | 60 | 1,7 | 0,0009 |
| 8 | Резец отогнутый Т5К10 | 0,003 | 60 | 1,7 | 0,00008 |
| 9 | Резец упорный проходной Т5К10 | 0,473 | 60 | 1,7 | 0,0134 |
| 10 | Резец упорный проходной Т5К10 | 0,2 | 60 | 1,7 | 0,0057 |
| 11 | Резец упорный проходной Т5К10 | 0,034 | 60 | 1,7 | 0,0009 |
| 12 | Резец канавочный специальный Р6М5 | 0,016 | 30 | 1,7 | 0,0009 |
| 13 | Резец канавочный специальный Р6М5 | 0,016 | 30 | 1,7 | 0,0009 |
| 14 | Резец упорный проходной Т5К10 | 0,034 | 60 | 1,7 | 0,0009 |
| 15 | Резец упорный проходной Т5К10 | 0,0675 | 60 | 1,7 | 0,0019 |
| 16 | Резец упорный проходной Т5К10 | 0,473 | 60 | 1,7 | 0,0134 |
| 17 | Резец упорный проходной Т5К10 | 0,003 | 60 | 1,7 | 0,00008 |
| 18 | Резец упорный проходной Т15К6 | 0,034 | 60 | 3,18 | 0,0018 |
| 19 | Резец упорный проходной Т15К6 | 0,2 | 60 | 3,18 | 0,0106 |
| 20 | Резец упорный проходной Т15К6 | 0,085 | 60 | 3,18 | 0,0045 |
| 21 | Резец канавочный специальный Т15К6 | 0,0068 | 60 | 3,18 | 0,0003 |
| 22 | Резец канавочный специальный Т15К6 | 0,0015 | 60 | 3,18 | 0,00008 |
| 23 | Резец отогнутый Т15К6 | 0,0014 | 60 | 3,18 | 0,00007 |
| 24 | Резец упорный проходной Т15К6 | 0,034 | 60 | 3,18 | 0,0018 |
| 25 | Резец упорный проходной Т15К6 | 0,2 | 60 | 3,18 | 0,0106 |
| 26 | Резец упорный проходной Т15К6 | 0,085 | 60 | 3,18 | 0,0045 |
| 27 | Резец канавочный специальный Т15К6 | 0,0068 | 60 | 3,18 | 0,0003 |
| 28 | Резец канавочный специальный Т15К6 | 0,0015 | 60 | 3,18 | 0,00008 |
| 29 | Резец отогнутый Т15К6 | 0,0014 | 60 | 3,18 | 0,00007 |
| 30 | Резец упорный проходной Т5К10 | 0,746 | 60 | 1,7 | 0,02114 |
| 31 | Сверло Р6М5 | 0,24 | 15 | 1,18 | 0,0188 |
| 32 | Торцевая фреза | 0,85 | 180 | 5,12 | 0,0242 |
|
|
0,17686 | ||||
Расчет ожидаемых внецикловых затрат по оборудованию (для одной позиции) tос производим по формуле:
tос![]() ,
,
где tп – средняя продолжительность простоев j-го нормализованного узла, который входит в состав оснащения конкретной позиции;
tр – время работы j-го нормализованного узла при выпуске единицы продукции;
k – общее количество нормализованных узлов в оснащении конкретной позиции.
Таблица 2.2 – Расчет потерь по оборудованию первого варианта
| Наименование позиции | Наименование механизмов |
Время простоев на 100
мин. работы |
Время работы j–го
нормализованного узла |
Простои конкретных механизмов |
|
||
| 1. Токарная |
1. Узел подачи и зажима заготовки 2. Шпиндельный блок с механизмом фиксации и приводом вращения 3. Узел продольных суппортов 4. Гидравлическое оборудование 5. Электрооборудование 6. Система охлаждения 7. Транспортер стружки |
0,55 0,18 0,06 0,17 0,65 0,08 0,24 |
0,64 0,64 0,64 0,64 0,64 0,64 0,64 |
0,00352 0,001152 0,000384 0,001088 0,00416 0,000512 0,001536 |
|
||
|
|
0,012352 |
|
|||||
| 2. Токарная |
1. Узел подачи и зажима заготовки 2. Шпиндельный блок с механизмом фиксации и приводом вращения 3. Узел продольных суппортов 4. Узел поперечных суппортов 5. Гидравлическое оборудование 6. Электрооборудование 7. Система охлаждения 8. Транспортер стружки |
0,55 0,18 0,06 0,07 0,17 0,65 0,08 0,24 |
0,21 0,21 0,21 0,003 0,21 0,21 0,21 0,21 |
0,001155 0,000378 0,000126 0,0000021 0,000357 0,001365 0,000168 0,000504 |
|
||
|
|
0,004055 |
|
|||||
| 3. Токарная с |
1. Узел подачи и зажима заготовки 2. Шпиндельный блок с механизмом фиксации и приводом вращения 3. Узел продольных суппортов 4. Узел поперечных суппортов 4. Гидравлическое оборудование 5. Электрооборудование 6. Система охлаждения 7. Транспортер стружки |
0,55 0,18 0,06 0,07 0,17 0,65 0,08 0,24 |
0,473 0,473 0,473 0,016 0,473 0,473 0,473 0,473 |
0,002602 0,000851 0,000284 0,0000112 0,000804 0,003075 0,000378 0,0011385 |
|
||
|
|
0,00914 |
|
|||||
| 4. Токарная |
1. Узел подачи и зажима заготовки 2. Шпиндельный блок с механизмом фиксации и приводом вращения 3. Узел поперечных суппортов 4. Узел поперечных суппортов 4. Гидравлическое оборудование 5. Электрооборудование 6. Система охлаждения 7. Транспортер стружки |
0,55 0,18 0,07 0,06 0,17 0,65 0,08 0,24 |
0,473 0,473 0,473 0,003 0,473 0,473 0,473 0,473 |
0,002602 0,000851 0,000331 0,0000018 0,000804 0,003075 0,000378 0,001135 |
|
||
|
|
0,009178 |
|
|||||
| 5. Токарная |
1. Узел подачи и зажима заготовки 2. Шпиндельный блок с механизмом фиксации и приводом вращения 3. Узел продольных суппортов 4. Узел поперечных суппортов 4. Гидравлическое оборудование 5. Электрооборудование 6. Система охлаждения 7. Транспортер стружки |
0,55 0,18 0,06 0,07 0,17 0,65 0,08 0,24 |
0,2 0,2 0,2 0,009 0,2 0,2 0,2 0,2 |
0,0011 0,00036 0,00012 0,0000063 0,00034 0,0013 0,00016 0,00048 |
|
||
|
|
0,003866 |
|
|||||
| 6. Токарная |
1. Узел подачи и зажима заготовки 2. Шпиндельный блок с механизмом фиксации и приводом вращения 3. Узел продольных суппортов 4. Узел поперечных суппортов 4. Гидравлическое оборудование 5. Электрооборудование 6. Система охлаждения 7. Транспортер стружки |
0,55 0,18 0,06 0,07 0,17 0,65 0,08 0,24 |
0,2 0,2 0,2 0,009 0,2 0,2 0,2 0,2 |
0,0011 0,00036 0,00012 0,0000063 0,00034 0,0013 0,00016 0,00048 |
|
||
|
|
0,003866 | 0,003866 | |||||
| 7. Токарная |
1. Узел подачи и зажима заготовки 2. Шпиндельный блок с механизмом фиксации и приводом вращения 3. Узел продольных суппортов 4. Гидравлическое оборудование 5. Электрооборудование 6. Система охлаждения 7. Транспортер стружки |
0,55 0,18 0,06 0,17 0,65 0,08 0,24 |
0,746 0,746 0,746 0,746 0,746 0,746 0,746 |
0,004103 0,001343 0,000448 0,001268 0,004849 0,000597 0,00179 |
|
||
|
|
0,014398 |
|
|||||
| 8. Агрегатная |
1. Узел подачи и зажима заготовки 2. Силовая головка для фрезерования 3. Силовая головка для сверления 4. Гидравлическое оборудование 5. Силовой стол с гидроприводом 5. Поворотный стол 6. Электрооборудование 7. Система охлаждения 8. Транспортер стружки |
0,53 0,25 0,18*2 0,17 0,24*2 0,1 0,65 0,08*2 0,24 |
0,85 0,85 0,85 0,85 0,85 0,85 0,85 0,85 0,85 |
0,004505 0,002125 0,00306 0,001445 0,00408 0,00085 0,005525 0,00136 0,00204 |
|
||
|
|
0,02499 |
|
|||||
|
|
0,081845 |
|
|||||
Таким образом:
![]() (мин).
(мин).
Производительность данного варианта:
![]() деталей/смену.
деталей/смену.
Вариант 2
1.
Станок – двухсторонний
гидрокопировальный полуавтомат: точить поверхности 8 (![]() ), 2 (
), 2 (![]() ), 4 (
), 4 (![]() ), 7 (
), 7 (![]() ), 3 (
), 3 (![]() ), 1 (
), 1 (![]() ).
).
2.
Станок
полуавтомат: точить поверхности 10 (![]() ), 8 (
), 8 (![]() ), 6 (
), 6 (![]() ), 2 (
), 2 (![]() ); точить фаску 25 (
); точить фаску 25 (![]() ), точить канавку
шириной 10 мм на поверхности 9 (
), точить канавку
шириной 10 мм на поверхности 9 (![]() ).
).
3.
Станок
полуавтомат: точить поверхности 7 (![]() ),5 (
),5 (![]() ), 1 (
), 1 (![]() ), точить фаску 24 (
), точить фаску 24 (![]() ).
).
4.
Станок – двухсторонний
гидрокопировальный полуавтомат: чистовое точение поверхностей 2 (![]() ), 4 (
), 4 (![]() ), 6 (
), 6 (![]() ), точить канавки 12 (
), точить канавки 12 (![]() ), точить фаску
20 (
), точить фаску
20 (![]() ),
точить канавку 14 (
),
точить канавку 14 (![]() ),точить фаску 23 (
),точить фаску 23 (![]() ), и фаску 19 (
), и фаску 19 (![]() ) с одной
стороны; чистовое точение поверхностей 1 (
) с одной
стороны; чистовое точение поверхностей 1 (![]() ), 3 (
), 3 (![]() ), 5 (
), 5 (![]() ), точить канавку 11 (
), точить канавку 11 (![]() ), точить фаску
21 (
), точить фаску
21 (![]() ),
точить канавку 13 (
),
точить канавку 13 (![]() ), точить фаску 22 (
), точить фаску 22 (![]() ) и фаску 18 (
) и фаску 18 (![]() ) с другой
стороны.
) с другой
стороны.
5.
Станок
полуавтомат: продольное точение поверхности 9 (![]() ).
).
6.
Станок
агрегатный: сверление отверстий 15, 16 (![]() ); фрезерование лыски 17 (
); фрезерование лыски 17 (![]() ).
).
Значение tз и tпр для разных типов инструментов занесены в таблицу 2.3.
Таблица 2.3 – Расчет времени потерь по инструменту
|
№ Опер. |
Инструмент |
|
|
( мин. |
|
| 1 | Резец упорный проходной Т5К10 | 0,64 | 60 | 1,7 | 0,0181 |
| 2 | Резец упорный проходной Т5К10 | 0,21 | 60 | 1,7 | 0,0059 |
| 3 | Резец упорный проходной Т5К10 | 0,034 | 60 | 1,7 | 0,0009 |
| 4 | Резец упорный проходной Т5К10 | 0,21 | 60 | 1,7 | 0,0059 |
| 5 | Резец упорный проходной Т5К10 | 0,0675 | 60 | 1,7 | 0,0019 |
| 6 | Резец упорный проходной Т5К10 | 0,2 | 60 | 1,7 | 0,0057 |
| 7 | Резец упорный проходной Т5К10 | 0,034 | 60 | 1,7 | 0,0009 |
| 8 | Резец отогнутый Т5К10 | 0,003 | 60 | 1,7 | 0,00008 |
| 9 | Резец упорный проходной Т5К10 | 0,473 | 60 | 1,7 | 0,0134 |
| 10 | Резец упорный проходной Т5К10 | 0,2 | 60 | 1,7 | 0,0057 |
| 11 | Резец упорный проходной Т5К10 | 0,034 | 60 | 1,7 | 0,0009 |
| 12 | Резец канавочный специальный Р6М5 | 0,016 | 30 | 1,7 | 0,0009 |
| 13 | Резец упорный проходной Т5К10 | 0,034 | 60 | 1,7 | 0,0009 |
| 14 | Резец упорный проходной Т5К10 | 0,0675 | 60 | 1,7 | 0,0019 |
| 15 | Резец упорный проходной Т5К10 | 0,473 | 60 | 1,7 | 0,0134 |
| 16 | Резец упорный проходной Т5К10 | 0,003 | 60 | 1,7 | 0,00008 |
| 17 | Резец упорный проходной Т15К6 | 0,034 | 60 | 3,18 | 0,0018 |
| 18 | Резец упорный проходной Т15К6 | 0,2 | 60 | 3,18 | 0,0106 |
| 19 | Резец упорный проходной Т15К6 | 0,085 | 60 | 3,18 | 0,0045 |
| 20 | Резец канавочный специальный Т15К6 | 0,0068 | 60 | 3,18 | 0,0003 |
| 21 | Резец канавочный специальный Т15К6 | 0,0015 | 60 | 3,18 | 0,00008 |
| 22 | Резец отогнутый Т15К6 | 0,0014 | 60 | 3,18 | 0,00007 |
| 23 | Резец упорный проходной Т15К6 | 0,034 | 60 | 3,18 | 0,0018 |
| 24 | Резец упорный проходной Т15К6 | 0,2 | 60 | 3,18 | 0,0106 |
| 25 | Резец упорный проходной Т15К6 | 0,085 | 60 | 3,18 | 0,0045 |
| 26 | Резец канавочный специальный Т15К6 | 0,0068 | 60 | 3,18 | 0,0003 |
| 27 | Резец канавочный специальный Т15К6 | 0,0015 | 60 | 3,18 | 0,00008 |
| 28 | Резец отогнутый Т15К6 | 0,0014 | 60 | 3,18 | 0,00007 |
| 29 | Резец упорный проходной (правый) Т5К10 | 0,746 | 60 | 1,7 | 0,02114 |
| 30 | Сверло Р6М5 | 0,24 | 15 | 1,18 | 0,0188 |
| 31 | Торцевая фреза | 0,85 | 180 | 5,12 | 0,0242 |
|
|
0,1754 | ||||
Таблица 2.4 – Расчет потерь по оборудованию первого варианта
|
Наименование позиции |
Наименование механизмов |
Время простоев на 100 мин.
работы |
Время работы j–го
нормализованного узла |
Простои конкретных механизмов
|
| 1. Токарная |
1. Узел подачи и зажима заготовки 2. Шпиндельный блок с механизмом фиксации и приводом вращения 3. Узел продольных суппортов 4. Гидравлическое оборудование 5. Электрооборудование 6. Система охлаждения 7. Транспортер стружки |
0,55 0,18 0,06*2 0,17 0,65 0,08*2 0,24 |
0,437 0,437 0,437 0,437 0,437 0,437 0,437 |
0,002404 0,000787 0,000524 0,000743 0,002841 0,000699 0,001049 |
|
|
0,009046 | |||
| 2. Токарная |
1. Узел подачи и зажима заготовки 2. Шпиндельный блок с механизмом фиксации и приводом вращения 3. Узел продольных суппортов 4. Узел поперечных суппортов 5. Гидравлическое оборудование 6. Электрооборудование 7. Система охлаждения 8. Транспортер стружки |
0,55 0,18 0,06 0,07 0,17 0,65 0,08 0,24 |
0,64 0,64 0,64 0,016 0,64 0,64 0,64 0,64 |
0,00352 0,001152 0,000384 0,0000112 0,001088 0,00416 0,000512 0,001536 |
|
|
0,012363 | |||
| 3. Токарная |
1. Узел подачи и зажима заготовки 2. Шпиндельный блок с механизмом фиксации и приводом вращения 3. Узел продольных суппортов 4. Узел поперечных суппортов 4. Гидравлическое оборудование 5. Электрооборудование 6. Система охлаждения 7. Транспортер стружки |
0,55 0,18 0,06*2 0,07*2 0,17 0,65 0,08 0,24 |
0,2 0,2 0,2 0,009 0,2 0,2 0,2 0,2 |
0,0011 0,00036 0,00012 0,0000063 0,00034 0,0013 0,00016 0,00048 |
|
|
0,003866 | |||
| 4. Токарная |
1. Узел подачи и зажима заготовки 2. Шпиндельный блок с механизмом фиксации и приводом вращения 3. Узел продольных суппортов 4. Узел поперечных суппортов 4. Гидравлическое оборудование 5. Электрооборудование 6. Система охлаждения 7. Транспортер стружки |
0,55 0,18 0,06 0,07 0,17 0,65 0,08 0,24 |
0,2 0,2 0,2 0,009 0,2 0,2 0,2 0,2 |
0,0011 0,00036 0,00012 0,0000063 0,00034 0,0013 0,00016 0,00048 |
|
|
0,003866 | |||
| 5. Токарная |
1. Узел подачи и зажима заготовки 2. Шпиндельный блок с механизмом фиксации и приводом вращения 3. Узел продольных суппортов 4. Гидравлическое оборудование 5. Электрооборудование 6. Система охлаждения 7. Транспортер стружки |
0,55 0,18 0,06 0,17 0,65 0,08 0,24 |
0,746 0,746 0,746 0,746 0,746 0,746 0,746 |
0,004103 0,001343 0,000448 0,001268 0,004849 0,000597 0,00179 |
|
|
0,014398 | |||
| 6. Агрегатная |
1. Узел подачи и зажима заготовки 2. Силовая головка для фрезерования 3. Силовая головка для сверления 4. Гидравлическое оборудование 5. Силовой стол с гидроприводом 5. Поворотный стол 6. Электрооборудование 7. Система охлаждения 8. Транспортер стружки |
0,53 0,25 0,18*2 0,17 0,24*2 0,1 0,65 0,08*2 0,24 |
0,85 0,85 0,12 0,85 0,85 0,85 0,85 0,85 0,85 |
0,004505 0,002125 0,00306 0,001445 0,00408 0,00085 0,005525 0,00136 0,00204 |
|
|
0,02499 | |||
|
|
0,068529 | |||
Таким образом:
![]() мин.
мин.
Производительность данного варианта:
![]() деталей/смену;
деталей/смену;
3. РОБОТИЗИРОВАННЫЕ КОМПЛЕКСЫ
Транспортные системы являются одним из основных элементов автоматизированного производства в любой отрасли промышленности. Кроме основных функций — перемещения изделий и материалов, транспортные системы могут изменять ориентацию, производить накопление и адресование изделий, осуществлять обработку изделий и материалов в процессе перемещения. Наиболее полно возможности транспортных систем реализованы в автоматических линиях, нашедших широкое применение в массовом производстве. В автоматических линиях полностью решены вопросы загрузки и выгрузки ТМ, передачи изделий с одного участка на другой. В этих линиях обычно применяются специальные или специализированные транспортеры, предназначенные для перемещения одного или нескольких видов изделий. Необходимость частой переналадки технологического оборудования на другой тип изделий, характерна для большинства современных быстросменных и многономенклатурных производств, сопряжена с большими материальными и временными затратами, исключающими применение традиционных автоматических линий.
При обслуживании металлорежущих станков промышленные роботы (ПР) выполняют следующие вспомогательные операции: установку заготовок в рабочей зоне станка и снятие обработанной детали с укладкой ее на конвейер, в ориентирующий магазин и т. п.; контроль размеров заготовок и обработанных деталей; очистку базовых поверхностей деталей, заготовок и фиксирующих приспособлений станка от грязи и стружки; проверку правильности базирования и фиксации заготовок в зажимных приспособлениях станка; смену захватов, а также режущего и вспомогательного инструмента. ПР может осуществлять поиск, опознавание детали и перебазирование ее в процессе обработки. При обслуживании группы станков ПР обеспечивает межстаночное транспортирование деталей.
Типовым примером одностаночного РТК с встроенным ПР являются комплексы на базе ПР мод. M10П.62.01 и его модификаций. ПР может быть закреплен в различных положениях в зависимости от схемы загрузки станка и оснащен двухместным захватом.
Как правило, указанные РТК содержат тактовые накопители, предназначенные для транспортирования деталей в зону работы ПР. Заготовки могут располагаться либо непосредственно на накопителе, либо на спутниках, закрепленных на накопителе. Возможна также работа ПР и со стационарной многопозиционной тарой.
Планировка РТК с ПР мод. М10П.62.01 показана на рис. 3.1.РТК укомплектован тактовым столом 5, на котором устанавливается запас заготовок, достаточный для двух- восьмичасовой работы комплекса. В состав РТК входит также система 3 управления станком.
Тактовый стол подает заготовку на фиксированную позицию, на которой ее снимает рука ПР 2 и устанавливает в рабочую зону станка 1. После обработки готовая деталь снимается и устанавливается роботом в ту же позицию тактового стола. Затем система управления роботом формирует сигнал для перемещения тактового стола на один шаг: готовая деталь перемещается на другую позицию, а на ее место поступает новая заготовка.
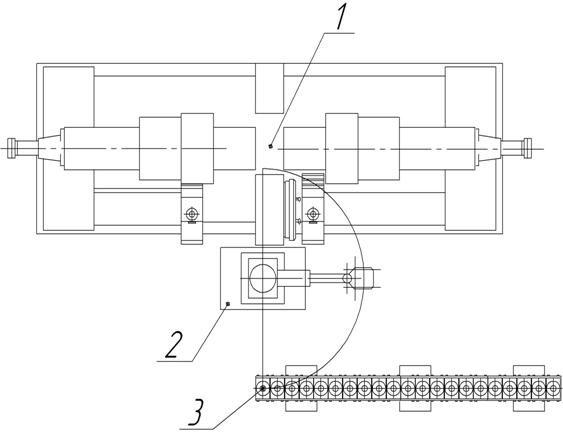
Рисунок 3.1 – Планировка РТК с ПР
Рисунок 3.1 – Пример РТК для обработки деталей типа вал
4 РАСЧЕТ ЭКОНОМИЧЕСКИХ ПОКАЗАТЕЛЕЙ
Показателем экономической эффективности являются неполные приведенные затраты.
Неполные приведенные затраты (с учетом принятых допущений):
![]() =
=![]()
где К – стоимость технологического оборудования;
З заработная плата (считаем постоянной).
Составим таблицу 4.1 и 4.2, в которой укажем стоимость каждой единицы оборудования.
Таблица 4.1 – Стоимость оборудования для первого варианта
|
№ обор. |
Наименование оборудования |
Стоимость оборудования |
| 1 | Станок автомат | 15000 |
| 2 | Станок автомат | 15000 |
| 3 | Станок автомат | 15000 |
| 4 | Станок автомат | 15000 |
| 5 | Станок автомат | 15000 |
| 6 | Станок автомат | 15000 |
| 7 | Станок автомат | 15000 |
| 8 | Агрегатный станок | 10000 |
| 115000 | ||
Таблица 4.2 – Стоимость оборудования для второго варианта
|
№ обор. |
Наименование оборудования |
Стоимость оборудования |
| 1 | Станок автомат | 15000 |
| 2 | Станок автомат | 15000 |
| 3 | Станок автомат | 15000 |
| 4 | Станок автомат | 15000 |
| 5 | Станок автомат | 15000 |
| 6 | Агрегатный станок | 10000 |
| 85000 | ||
Рассмотрев приведенные варианты, окончательно выбираем тот, что отличается наиболее низкими значениями приведенных затрат.
ВЫВОД
В данной курсовой работе рассматривался процесс проектирования автоматической линии технологического оборудования.
Поставленная цель работы - спроектировать оптимальную структурно-компоновочную схему автоматической линии для условий серийного производства детали типа «Ось» - была полностью достигнута, при этом было выполнено основное требование к проектируемой линии: обеспечена требуемая производительность при наилучших экономических показателях.
Курсовая работа включает данную пояснительную записку, которая содержит все необходимые сведения о проектировании автоматической линии; чертеж компоновки автоматической линии с обозначением всех позиций и спецификацией; циклограмма работы автоматической линии.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Справочник нормировщика-машиностроителя. Т.2. Техническое нормирование станочных работ.
2. Горбацевич А.Ф., Шкред В.А. Курсовое проектирование по технологии машиностроения. – Мн: Выш. Школа, 1983. – 256 с.
3. Справочник Технолога-машиностроителя. Т. 1 /Под ред. А.Г.Косиловой и Р.К.Мещерякова. – Г.: Машиностроение, 1985. 656 с.; Справочник Технолога-машиностроителя. Т. 2 /Под ред. А.Г.Косиловой и Р.К.Мещерякова. – Г.: Машиностроение, 1985. – 496 с.
5. Проектирование и разработка промышленных роботов/ С. С. Аншин, А. В. Бабич, А. Г. Баранов и др.; Под общ. ред. Я. А. Шифрина, П. Н. Белянина. – М.: Машиностроение, 1989. -272 с.
6. Токарные полуавтоматы, автоматы и автоматизированные линии/ Б. Л.Богуславский – М.: Издательство Профтехиздат. 1961. – 591 с.
© 2009 База Рефератов