
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по цифровым устройствам
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Учебное пособие: Интегральные микросхемы
Учебное пособие: Интегральные микросхемы
Интегральные микросхемы (ИМС): общие сведения, классификация, условно-графическое обозначение, маркировка [3].
В зависимости от технологии изготовления интегральные микросхемы могут быть полупроводниковыми, пленочными или гибридными.
Полупроводниковая микросхема -микросхема, все элементы и межэлементные соединения которой выполнены в объеме и на поверхности полупроводника.
Пленочная микросхема - микросхема, все элементы и межэлементные соединения которой выполнены только в виде пленок проводящих и диэлектрических материалов. Вариантами пленочных являются тонкопленочные и толстопленочные микросхемы.
Различие между тонкопленочными и толстопленочными микросхемами может быть количественным и качественным. К тонкопленочным условно относят микросхемы с толщиной пленок менее 1 мкм, а к толстопленочным - микросхемы с толщиной пленок свыше 1 мкм.
Гибридная микросхема - микросхема, содержащая кроме элементов простые и сложные компоненты (например, кристаллы микросхемы полупроводниковых микросхем). Одним из видов гибридной микросхемы является многокристальная микросхема.
В зависимости от функционального назначения интегральные микросхемы делятся на аналоговые и цифровые. Аналоговые микросхемы предназначены для преобразования и обработки сигналов, изменяющихся по закону непрерывной функции. Частным случаем этих микросхем является микросхема с линейной характеристикой, линейная микросхема. С помощью цифровых микросхем преобразуются, обрабатываются сигналы, изменяющиеся по закону дискретной функции. Частным случаем цифровых микросхем являются логические микросхемы, выполняющие операции с двоичным кодом, которые описываются законами логической алгебры.
Минимальный состав комплекта интегральных микросхем, необходимый для решения определенного круга аппаратурных задач, называется базовым.
После появления микропроцессоров были введены дополнительные термины. Микропроцессор определен как программно-управляемое устройство, осуществляющее процесс обработки цифровой информации и управления им. Это устройство изготовлено на основе одной или нескольких больших интегральных схем (БИС).
Микропроцессорной названа микросхема, выполняющая функцию МП или его часть. Совокупность этих и других микросхем, совместимых по архитектуре, конструктивному исполнению и электрическим параметрам, называется микропроцессорным комплектом.
В последние годы в классификацию ИС вводятся новые понятия: микросхемы общего назначения, заказные и полузаказные.
Заказная микросхема - микросхема, разработанная на основе стандартных и (или) специально созданных элементов узлов по функциональной схеме заказчика предназначена для определенной радиоэлектронной аппаратуры (РЭА).
Полузаказная интегральная микросхема - микросхема, разработанная на основе базовых кристаллов ( в том числе матричных).
Система условных обозначений микросхем. Аналоговые и цифровые интегральные микросхемы разрабатываются и выпускаются предприятиями - изготовителями в виде серий. Каждая серия отличается степенью комплектности и содержит несколько микросхем, которые, в свою очередь, подразделяются на типономиналы. К серии микросхем относят совокупность типов микросхем, которые могут выполнять различные функции, но имеют единое конструктивно-технологическое исполнение и предназначены для совместного применения. Как правило, с течением времени состав перспективных серий расширяется.
Тип интегральной микросхемы - интегральная микросхема конкретного функционального назначения и определенного конструктивно-технологического и схемотехнического решения, имеющая свое условное обозначение. Под типономиналом интегральной микросхемы понимается микросхема конкретного типа, отличающаяся от других микросхем того же типа одним или несколькими параметрами.
Группа типов микросхем - совокупность типов микросхем в пределах одной серии, имеющих аналогичное функциональное назначение и принцип действия, свойства которых описываются одинаковым или же близким составом электрических параметров.
Условные обозначения микросхем
Все многообразие выпускаемых серий микросхем согласно принятой системе условных обозначений по конструктивно-технологическому исполнению делится на три группы: полупроводниковые, гибридные, прочие. К последней группе относят пленочные микросхемы, которые в настоящее время выпускаются в ограниченном количестве, а также вакуумные и керамические. Указанным группам микросхем в системе условных обозначений присвоены следующие цифры: 1, 5, 7 - полупроводниковые (обозначение 7 присвоено бескорпусным микросхемам); 2, 4, 8 - гибридные; 3 - прочие микросхемы.
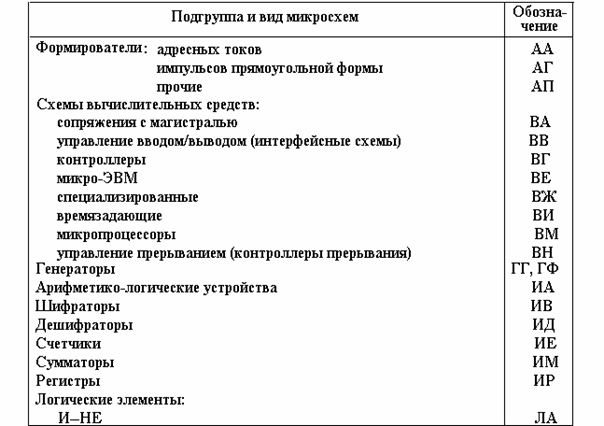
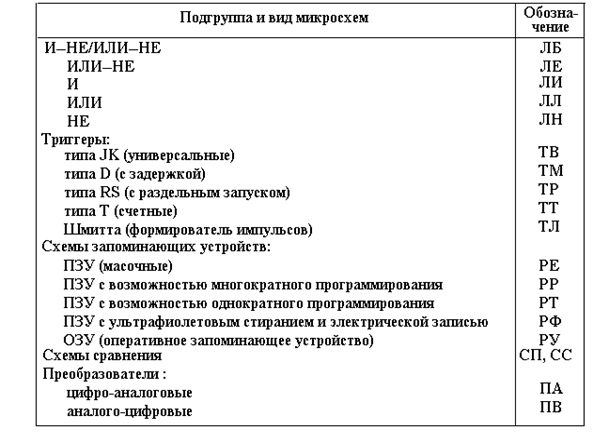
По характеру выполняемых функций микросхемы подразделяются на подгруппы (генераторы, модуляторы, триггеры, усилители, логические схемы и др.) и виды (преобразователи частоты, фазы, длительности, напряжения и др.). Классификация наиболее популярных микросхем по функциональному назначению приведена в таблице 6.1.
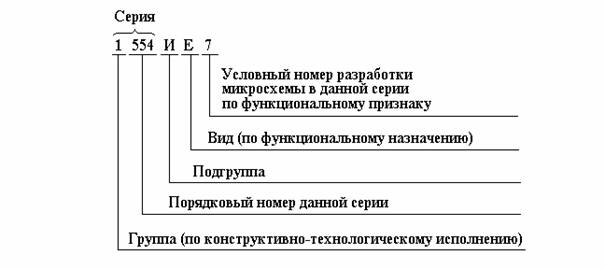
По принятой системе, обозначение микросхемы должно состоять из четырех элементов. Первый элемент - цифра, соответствующая конструктивно-технологической группе. Второй элемент - две-три цифры, присвоенные данной серии как порядковый номер разработки. Таким образом, первые два элемента составляют три-четыре цифры, определяющие полный номер серии микросхемы. Третий элемент - две буквы, соответствующие подгруппе и виду (табл. 6.1). Четвертый элемент - порядковый номер разработки микросхемы в данной серии, в которой может быть несколько одинаковых по функциональному признаку микросхем. Он может состоять как из одной цифры, так и из нескольких.
В качестве примера рассмотрим условное обозначение полупроводниковой микросхемы серии 1554ИР22. Из условного обозначения следует, что эта микросхема - регистр с порядковым номером 554 и номером разработки микросхемы в данной серии по функциональному признаку 22 выполнена по полупроводниковой технологии.
Таблица 1
Пример условного обозначения полупроводниковой микросхемы: обозначение - ИЕ (счетчик) с порядковым номером серии 554 и номером разработки микросхемы в данной серии по функциональному признаку 7. Полное обозначение микросхемы 1554ИЕ7.
В последнее время при четырехзначном номере серии первую цифру порядкового номера серии устанавливают в зависимости от функционального назначения микросхем, входящих в серию. Например, цифра 0 определяет, что данная серия микросхем предназначена для работы в составе бытовой радиоэлектронной аппаратуры. Цифра 1 ставится на аналоговых микросхемах, цифра 4 - микросхемам ОУ, цифра 5 - цифровым микросхемам, цифра 6 - серии микросхем памяти, цифра 8 - сериям МП.
Если в конце условного обозначения стоит буква, то она определяет технологический разброс электрических параметров данного типономинала.
На микросхемах, используемых в устройствах широкого применения, в начале обозначения ставится буква К, например: К1533ИР22.
Для характеристики материала и типа корпуса перед цифровым обозначением серии могут быть добавлены следующие буквы: Р - пластмассовый корпус типа ДИП; М - металлокерамический корпус типа ДИП и т.д.
Основные электрические параметры микросхем
Цифровые микросхемы развивались в следующей последовательности: резистивно-транзисторная логика (РТЛ), диодно-транзисторная логика (ДТЛ), транзисторно-транзисторная логика (ТТЛ), эмиттерно-связанная логика (ЭСЛ), транзисторно-транзисторная логика с диодами Шотки (ТТЛШ), интегрально-инжекционная логика (И2Л). В этих определениях слово “логика” подразумевает понятие “электронный ключ”.
Все перечисленные выше логические микросхемы выполнены на базе биполярных транзисторов. Наряду с ними широкое распространение получили цифровые микросхемы на МОП - структурах (на транзисторах p- и n-типов с обогащенным каналом, КМОП - схемы на дополняющих транзисторах). Серии РТЛ, РЕТЛ промышленностью в настоящее время не выпускаются, но еще используются только для комплектации серийной РЭА. Наиболее широкое распространение в современной аппаратуре получили серии микросхем ТТЛШ, ЭСЛ и схемы на КМОП-структурах, так как они отличаются более высоким уровнем интеграции и обладают большим функциональным разнообразием.
Можно выделить три этапа развития микросхем, входящих в состав стандартных серий для создания цифровых устройств различного назначения.
I этап (1969 - 1975 гг.). В состав стандартных серий входили микросхемы малой степени интеграции, выполняющие простейшие логические функции, например серия К155.
II этап (1976 - 1980 гг.). Появились серии с улучшенными характеристиками, такие как 531, 555, 500, К561, К1561 и другие, что привело к ограниченному применению серий 131, 158, 137, 187.
III этап (1981 - 1987 гг.). Разработка микросхем большой степени интеграции, микропроцессорных комплектов, запоминающих устройств, полузаказных БИС на основе матричных кристаллов.
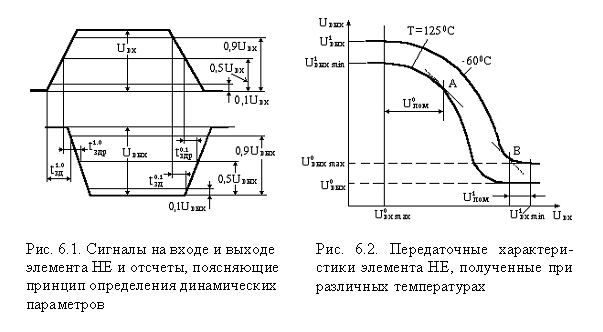
Параметры микросхем конкретной серии в основном определяются параметрами базовых элементов логики. К основным параметрам относятся: быстродействие; потребляемая мощность (Рпот); помехоустойчивость Uпом; коэффициент разветвления по выходу (нагрузочная способность) Краз; коэффициент объединения по входу Коб. Быстродействие определяется динамическими параметрами цифровых микросхем, к которым относятся: t1,0 - время перехода сигнала на выходе микросхемы из состояния логической “1” в состояние логического “0”; t0,1 -время перехода из состояния низкого уровня в состояние высокого уровня; t1,0здр - время задержки распространения при включении; t1,0зд -время задержки включения; t0,1здр - время задержки распространения при выключении; t0,1зд - время задержки выключения; tздрср - среднее время задержки распространения сигнала; fр - рабочая частота. Среднее время задержки распространения tэдрср = 0,5(t1,0здр + t0,1здр) является усредненным параметром быстродействия микросхемы, используемым при расчете временных характеристик последовательно включенных цифровых микросхем. На рис. 6.1 показаны уровни отсчета, определяющие параметры быстродействия цифровых микросхем.
В зависимости от технологии микросхем, мощности, потребляемые при состоянии логического нуля и при состоянии логической “1” могут отличаться. Поэтому, мощность, потребляемая логическими элементами в динамическом режиме, определяется как
Рпотср = 0,5(Р0пот + Р1пот),
где Р0пот - мощность, потребляемая микросхемой при состоянии выхода “0”, Р1пот - мощность при выходном состоянии “1”.
Некоторые логические элементы кроме статической средней мощности характеризуются мощностью, потребляемой на максимальной частоте переключения, когда токи в цепях питания возрастают во много раз. К таким схемам относятся микросхемы КМОП технологии, которые потребляют микроамперы, если нет переключающих сигналов.
Допустимый уровень напряжения помехи логического элемента определяется уровнем входного напряжения, при котором еще не происходит ложное срабатывание микросхемы.
В статическом режиме помехоустойчивость определяется по низкому U0пом и высокому U1пом уровням. Значения U0пом и U1пом определяют с помощью передаточных характеристик (рис. 6.2.). Как следует из рис. 6.2, напряжение помехи по высокому уровню определяется как разность минимального напряжения высокого уровня U1вхmin и напряжения в точке перегиба верхней кривой (точка В). Параметр U0пом определяется как разность напряжения низкого уровня U0вхmax.
Помехоустойчивость в динамическом режиме зависит от длительности, амплитуды и формы импульса помехи, а также от запаса статической помехоустойчивости и скорости переключения логического элемента.
Коэффициент разветвления по выходу Краз определяет число входов аналогичных элементов, которое может быть подключено к выходу предыдущего элемента без нарушения его работоспособности. С увеличением нагрузочной способности расширяются возможности применения цифровых микросхем и уменьшается число корпусов в разрабатываемом устройстве. Однако при этом ухудшаются помехоустойчивость и быстродействие микросхемы и возрастает потребляемая мощность.
Коэффициент объединения по входу Коб определяет максимальное число входов цифровых микросхем.
Базовые логические элементы
Существуют три базовых логических элемента, выполняющих логические операции сложения, умножения и отрицания: элемент И, элемент ИЛИ и элемент НЕ (инвертор), которые обозначаются на принципиальных электрических схемах как показано на рис.1

Рис. 1. Базовые логические элементы.
Работа логического элемента может быть представлена таблицей истинности, в которой указаны состояния входов (A,B и т.д.) и выходов (F):
Элемент И F=A.B Элемент ИЛИ F=A+B Элемент НЕ F=A
| Вх A | Вх B | Выход F | Вх A | Вх B | Выход F | Вход | Выход | ||
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | ||
| 1 | 0 | 0 | 1 | 0 | 1 | 1 | 0 | ||
| 0 | 1 | 0 | 0 | 1 | 1 | ||||
| 1 | 1 | 1 | 1 | 1 | 1 |
Знак
отрицания (инверсии) обычно обозначается чертой над буквой ![]() , а на принципиальной
схеме - кружком у соответствующего вывода. Практическая реализация инвертора на
биполярном и МОП транзисторах показана на рис.2. Количество входов у
логического элемента может быть больше двух, в этом случае тоже можно легко
построить таблицу истинности. В практических схемах иногда существуют
незадействованные входы, которые нужно соединить, в соответствии с логикой
схемы, с общим проводом (землей) или через резистор с проводом питания (для
ТТЛ-схем Uпит=+5В).
, а на принципиальной
схеме - кружком у соответствующего вывода. Практическая реализация инвертора на
биполярном и МОП транзисторах показана на рис.2. Количество входов у
логического элемента может быть больше двух, в этом случае тоже можно легко
построить таблицу истинности. В практических схемах иногда существуют
незадействованные входы, которые нужно соединить, в соответствии с логикой
схемы, с общим проводом (землей) или через резистор с проводом питания (для
ТТЛ-схем Uпит=+5В).
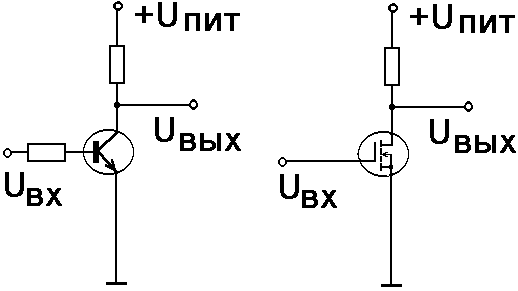
Рис. 2. Инвертор на основе биполярного и МОП транзисторов
Комбинируя базовые логические элементы, можно получить достаточно сложную схему. Для схемы ИЛИ различают обычное ИЛИ (включающее) и исключающее ИЛИ.
| Исключающее ИЛИ | Элемент ИЛИ-НЕ | |||||
| Вх A | Вх B | Выход F | Вх A | Вх B | Выход F | |
| 0 | 0 | 0 | 0 | 0 | 1 | |
| 1 | 0 | 1 | 1 | 0 | 1 | |
| 0 | 1 | 1 | 0 | 1 | 1 | |
| 1 | 1 | 0 | 1 | 1 | 0 | |
Триггеры
Триггер - электронное устройство, которое может находиться в двух устойчивых состояниях, поэтому они применяются в статических оперативных запоминающих устройствах (СОЗУ) как элемент памяти на один бит информации. Триггеры подразделяются на тактируемые (синхронные) и нетактируемые (асинхронные). Синхронный триггер меняет свое только при подаче определенного сигнала на тактируемый вход, причем тактирование может, осуществляется как по уровню ("1" или "0"), так и по фронту сигнала (переход "1" -> "0" или наоборот). Различают RS, D, T и JK триггеры. На рис.3 показана реализация асинхронного RS-триггера на ИЛИ-НЕ элементах (подумайте: как реализовать RS-триггер на И-НЕ элементах). Входы триггера обозначены буквами R (reset-сброс) и S (set-установка). Таблица истинности RS-триггера на элементах ИЛИ-НЕ приведена ниже.
| S | R | Q | Qinv |
| 0 | 0 | 0 | Qinv |
| 1 | 0 | 1 | 0 |
| 0 | 1 | 0 | 1 |
| 1 | 1 | x | x |
Здесь состояние S=1 и R=1 является неопределенным (проанализируйте работу схемы и скажите почему?).
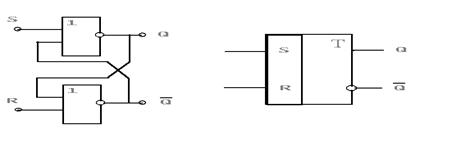
Рис.3 RS-триггер
D-триггер (delay-задержка) имеет два входа: D - информационный и C - тактовый (рис,4 А) и работает с нижеприведенной таблицей),тактирование осуществляется передним фронтом):
| C | D | Q | Qinv |
|
0->1 1->0 |
0 1 |
0 1 |
1 0 |
Более сложную функциональную нагрузку может нести JK-триггер (рис. 4 B). J и K - входы такого устройства - управляющие, а C - тактовый. Подавая на входы J и K логические "1" и "0" можно установить необходимое состояние выхода Q, т.е. JK-триггер работает как RS-триггер. Когда J=K=1 данное устройство перебрасывается в противоположное состояние (по приходу тактового импульса) т.е. работает как двоичный счетчик (или Т -триггер). состояние J=K=0 - хранение информации. Кроме J и K входов схема может иметь и нетактируемые R и S входы. Работу JK-триггера можно представить таблицей:
| J | K | Q |
Qinv |
| 0 | 0 | 0 | 0 |
| 0 | 0 | 1 | 1 |
| 1 | 0 | 0 | 1 |
| 1 | 0 | 1 | 1 |
| 0 | 1 | 0 | 0 |
| 0 | 1 | 1 | 0 |
| 1 | 1 | 0 | 1 |
| 1 | 1 | 1 | 0 |
Здесь Q и Q* - состояние выхода до и после прихода синхроимпульса на вход С.
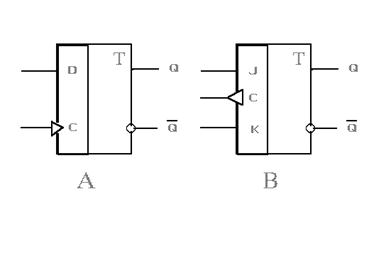
Рис. 4 D-триггер (A) и JK-триггер (B).
Регистры, счетчики, дешифраторы
Регистры - схемы, служащие для кратковременного запоминания многоразрядных двоичных чисел и состоящие из нескольких триггеров. Различают регистры с параллельным и последовательным вводом и выводом информации. Регистры сдвига имеют последовательный вход и параллельный выход, т.е. могут служить для преобразования последовательного кода в параллельный. Регистры, в которых сдвиг информации возможен как вправо, так и влево, называются реверсивными. На рис.5 показан регистр К155ИР1.
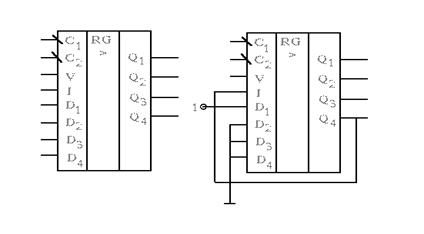
Рис.5 Регистр К155ИР1 в качестве кольцевого счетчика.
Здесь входы D1-D4 - для приема параллельного кода, а вход I - для приема последовательного, Q1-Q4 - выход информации в параллельном коде. Запись параллельного кода с D1-D4 происходит при V="1" и поступлении на тактовый вход C1 импульса. Запись последовательного кода осуществляется с входа I при V="0". После поступления 4 тактовых импульсов на вход С2 на выходах Q1-Q4 будет параллельный код.
Замкнув в кольцо регистр сдвига можно получить кольцевой счетчик, например как на рис.5. Начальная установка осуществляется при V="1" подачей импульса на С1. В счетном режиме, когда V="0" и тактовые импульсы поступают на С2, наблюдается сдвиг логической единицы по кольцу на выходах Q1-Q4: 1000, 0100, 0010, 0001 и т.д. с коэффициентом пересчета равным 4. Возникновение случайной помехи ("0") на D1 приведет к стиранию "бегающей" единички. Соединив выходы Q1-Q4 через элемент ИЛИ-НЕ с входов I получим кольцевой счетчик с коэффициентом 5 без влияния помех.Простейшим счетчиком с модулем счета 2 может служить триггер. Соединив последовательно N триггеров получим двоичный счетчик с модулем счета 2N. Различают суммирующие и вычитающие, а также реверсивные счетчики (рис.6А). Здесь Т(+) и Т(-) - счетные входы, R и S - установочные входы, Q1-Q4 - выходы.

Рис.6 Реверсивный счетчик и дешифратор.
Кроме двоичных счетчиков часто используются десятичные, которые можно построить из двоичного счетчика и дешифратора (рис.6B). Шифраторы и дешифраторы применяются для преобразования код-код.
Тормозные режимы ДПТ: виды, характеристики. Изменение направления вращения.
При использовании и электроприводе постоянного токе двигателя с независимым возбуждением (напряжение возбуждения Uv ток вочзбждения /„, сопротивление обмотки возбуждения Rв (рис. 3.3, а) уравнение электромеханической характеристики w(I) получитcz подстановкой (3.2) в (3.3) и решением относительно w:
w=(U –IR)/КФ
Механическую характеристику ш(Л/) получим, подставив в (3.4) ток, выраженный из (3.1):
w=![]()
При заданных U, Ф и R уравнения (3.4) и (3.5) однозначно определяют связь между w, I и М в любых режимах. Характеристики w(M) и w(I)— это прямые линии, проходящие через две характерные точки: М= О, w=w0 и w=0, I = Iк з, М = Мкзк при Ф = const они различаются лишь масштабами по оси абсцисс.
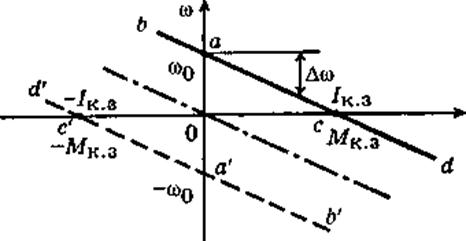
Рис.3.3. Схема двигателя постоянного тока независимого возбуждения (а) и ме-«иническис (электромеханические) характеристики при U= const (б)
Скорость w0 = U)/КФ (рис. 3.3, б) соответствует режиму идеального холостого хода: M = 0,E=U направлены встречно. ,. Величина ∆w=MR/(KФ)² — перепад скорости под влиянием нагрузки.
Увеличив нагрузку при определенных условиях, которые рассматриваются ниже, можно прийти к режиму короткого замыкания w=0
I= U/R = Iк.з М=kФIк.з+Мк.з
При изменении полярности U характеристика займет положение, показанное на рис. 3.3 б штриховой линией.
Участки характеристики между точками w0 и Мк.з, где знаки w и М совпадают, соответствуют, как было условлено ранее, двигательным режимам работы; участки с разными знаками w и М — тормозным режимам.
Тормозные режимы — это генераторные режимы, поскольку механическая энергия, поступившая с вала машины, преобразуется в электрическую и передается через выводы машины. В зависимости от того, куда поступает электрическая энергия, различают три тормозных режима.
Торможение с отдачей энергии в сеть (рекуперативное) или генераторный режим работы параллельно с сетью. Если якорь двигателя вращать от некоторого постороннего источника со скоростью, превышающей скорость идеального холостого хода, то ЭДС двигателя будет больше приложенного напряжения, в результате чего ток в якоре двигателя и момент изменят свой знак. Механическая энергия, поступающая при этом на вал двигателя, преобразуется в электрическую и за вычетом потерь в двигателе рекуперируется в сеть.
На механических характеристиках торможению с отдачей энергии в сеть соответствуют участки ab и а'Ь' (рис. 3.3, б).
Торможение противовключением или генераторный резким работы последовательно с сетью. В режиме противовключения изменяется знак скорости двигателя при сохранении знака момента или знак момента двигателя при сохранении знака скорости. Первый случай имеет место при воздействии активного момента статической нагрузки, превышающего момент короткого замыкания на данной характеристике.
В результате изменения знака скорости ЭДС двигателя будет совпадать с приложенным напряжением и ток в якоре определится выражением
I=(U+E)IR.
Второй случай используется для останова двигателя путем изменения полярности напряжения, подводимого к его якорю.
Вследствие механической инерции скорость двигателя и ЭДС в начальный момент сохраняются неизменными, а ток будет равен
I=(-U-E)IR.
На механических характеристиках (рис. 3.3, б) торможению противовключением соответствуют участки cd и с'а".
В режиме торможения противовключением энергия поступает в привод и со стороны механизма, и от сети и рассеивается в сопротивлениях якорной цепи; в предыдущем случае энергия, поступающая от механизма, передавалась в сеть.
Динамическое торможение или генераторный режим работы независимо от сети. Если якорная цепь отключена от источника питания и замкнута на внешний резистор, то при вращении двигателя от внешнего источника или по инерции в якорной цепи индуцируется ЭДС и протекает ток I = — EIR, создающий момент. Характеристики проходят через начало координат — штрих-пунктирная линия на рис. 3.3, б. Энергия, поступившая с вала, рассеивается в тормозном резисторе.
Реверсирование двигателя постоянного тока
Для того чтобы изменить направление вращения двигателя постоянного тока необходимо изменить полярность питания на обмотке возбуждения или якоре. Изменение полярности питания двигателя направление вращения не изменит. Простейшая схема реверсирования двигателя приведена на рис.34.
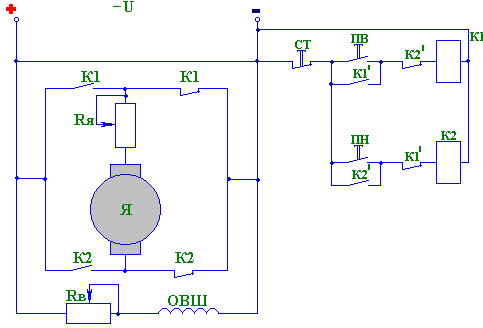
Рис.34
Схема состоит из двух магнитных пускателей К1 и К2, кнопок ПВ («Пуск вперед»), ПН («Пуск назад») и СТ («Стоп»), двигателя постоянного тока.
При включении кнопки ПВ («Пуск вперед») электрический ток проходит по цепи: «+» источника питания, замкнутая кнопка СТ («Стоп»), замкнутые контакты кнопки ПВ («Пуск вперед), замкнутые контакты К2, магнитный пускатель К1, «--» источника питания. Магнитный пускатель сработает и замкнет свои сигнально-блокировочные (в цепи управления) и силовые контакты (в цепи якоря). Когда сигнально-блокировочный контакт К11, подключенный параллельно кнопки ПВ, замкнется кнопку ПВ можно отпустить. Через замкнутые контакты К1, в цепи ротора, напряжение сети будет приложено к якорю, по цепи: «+» источника питания, замкнутый контакт К1, сопротивление Rя, катушка якоря, замкнутый контакт К2, «--» источника питания. Двигатель начнет вращаться. Второй сигнально-блокировочный контакт К11 разомкнется и заблокирует магнитный пускатель К2, для того чтобы не включались одновременно два пускателя «Вперед» и «Назад».
Для того чтобы двигатель вращался в другую сторону необходимо нажать кнопку ПН («Пуск назад»). Электрический ток потечет по цепи: : «+» источника питания, замкнутая кнопка СТ («Стоп»), замкнутые контакты кнопки ПН («Пуск назад»), замкнутые контакты К1, магнитный пускатель К2, «--» источника питания. Магнитный пускатель К2 сработает и замкнет свои контакты. Когда сигнально-блокировочный контакт К21, подключенный параллельно кнопки ПН, замкнется кнопку ПН можно отпустить. Через замкнутые контакты К2, в цепи ротора, напряжение сети будет приложено к якорю, по цепи: «+» источника питания, замкнутый контакт К2, катушка якоря, сопротивление Rя, замкнутый контакт К1, «--» источника питания. Двигатель начнет вращаться в противоположном направлении.
Для остановки двигателя необходимо нажать кнопку СТ («Стоп») цепь питания магнитных пускателей будет порвана. Обесточенные пускатели разомкнут свои контакты в цепи якоря и двигатель остановится.
Защита в эл. схемах управления эл.приводом: основные виды защит, аппараты управления и защиты.
Защита электродвигателей от таких анормальных факторов, как обрыв фазы, недопустимая несимметрия напряжения, заклинивание рабочей машины и самого электродвигателя, межвитковое замыкание, пониженное напряжение сети и др.
Комплексное устройство защиты работает на основе принципа сравнения измерений активной мощности электродвигателя и допустимого ее значения (как суммарного, так и по каждой фазе), а также исключения возможности включения электродвигателя при недопустимом снижении сопротивления изоляции (менее 0,5 МОм).
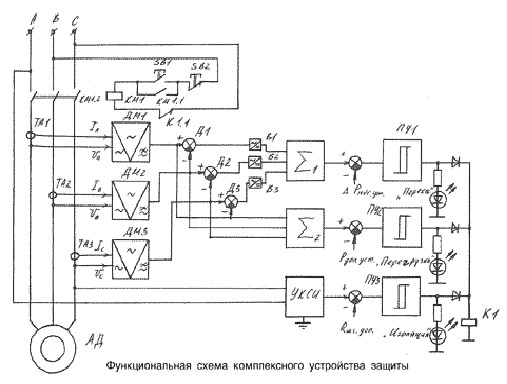
На рисунке изображена функциональная схема комплексного устройства защиты. Комплексное устройство защиты состоит из трех трансформаторов тока (ТА 1, 2, 3), трех датчиков активной мощности (ДМ 1, 2, 3), двух сумматоров (S1, S2), трех дискриминаторов ( Д 1, 2, 3), трех выпрямителей (В 1, 2, 3), трех преобразователей уровней (триггеров Шмидта) (ПУ 1, 2, 3), трех индикаторов («перекос», «перегрузка», «изоляция»), устройства контроля статорной изоляции (УКСИ), трех уставок (несимметрии (DРнес.уст.), перегрузка (Рдоп.), сопротивления изоляции (Rиз.доп.), промежуточного реле К1, контролирующего цепь управления магнитного пускателя КМ1.
Комплексное устройство защиты работает следующим образом.
При подключении комплексного устройства защиты к защищаемому электродвигателю автоматически происходит измерение изоляции обмотки статора УКСИ. Если измеренное сопротивление оказывается меньше допустимой величины (менее 0,5 МОм), преобразователь уровня ПУЗ подает сигнал на включение индикатора «изоляция» (светодиод загорается) и далее на промежуточное реле К1, которое блокирует включение электродвигателя (АД). При этом автоматически осуществляется электроосмотическая подсушка АД. При достижении необходимого сопротивления изоляции (0,5 МОм) ПУЗ снимает питание с реле К1, что дает возможность подключить цепь включения АД. После этого можно включить АД кнопкой SВ1, при этом магнитный пускатель КМ1 подключит контактами КМ1.2 фазы АД к сети и заблокирует кнопку SB1 контактом КМ1.1. Если произошла перегрузка АД, то появятся высокие, одинаковые по амплитуде, сигналы на ДМ 1, 2, 3, которые поступят на входы S2. На выходе S2 появится сигнал, равный сумме сигналов с ДМ 1, 2, 3. Далее сигнал с S2 сравнивается с уставкой Рдоп. Если значение сигнала на выходе S2 больше, то на выходе ПУ2 появится сигнал, который включит индикатор «перегрузка» и далее отключит АД посредством К1. Если произошла несимметрия (несимметрия фазных напряжений или токов по различным причинам), то на выходе ДМ 1, 2, 3 появятся
разные по амплитудам сигналы. На выходе S1 появится сигнал, отличный от нуля, и если он превысит уставку DРнес.уст., сработает ПУ1, загорится индикатор «перекос», запитается К1 и отключится АД.
Особенностью данного устройства защиты, в отличие от других подобных схемных решений, является, во-первых, измерение мгновенной активной мощности по всем трем фазам, что повышает надежность защиты при появлении анормальных режимов электродвигателя, во-вторых, создает оптимальную отключающую характеристику устройства защиты асинхронного электродвигателя.
Применение данного устройства защиты позволит исключить вероятность отказа АД из-за появления перегрузок, несимметрии, заклинивания рабочей машины, обрыва фазы как питающей сети, так и самого электродвигателя и переувлажнения изоляции статорной обмотки и последующего пробоя изоляции (на долю данных аварийных режимов приходится более 95% всех аварий).
Содержание и назначение принципиальных (полных) схем:
Схема принципиальная (полная) схема, определяющая полный состав элементов и связей между ними и, как правило, дающая детальное представление о принципах работы изделия (установки).
Схемами принципиальными пользуются для изучения принципов работы изделий (установок), а также при их наладке, контроле и ремонте. Они служат основанием для разработки других конструкторских документов, например, схем соединений (монтажных) и чертежей.
Принципиальная схема определяет полный состав элементов и связей между ними. Ее используют для изучения принципов работы изделий, а также при их наладке, регулировке, контроле и ремонте.
Принципиальные схемы позволяют проследить прохождение тока в каждой цепи, понять работу отдельных аппаратов, связанную с прохождением тока в тех или иных цепях. Они позволяют установить количество элементов, входящих в их состав.
Каждый элемент, входящий в схему изделия, должен иметь буквенно-цифровое обозначение, которое необходимо для указания в сокращенном виде сведений о нем, для ссылок на него в текстовых конструкторских документах и для нанесения непосредственно на изделие. Данные об элементах записывают в перечень элементов, который оформляют в виде таблицы, располагаемой обычно над основной надписью чертежа. Допускается в отдельных случаях помещать их около условных графических обозначений. Так, например, оформляют схемы в радиолюбительской литературе и журнале “Радио”.
В условных буквенно-цифровых обозначениях применяют прописные буквы латинского и русского алфавитов и арабские цифры одинаковой высоты. Приняты следующие обозначения элементов: конденсаторы – С, генераторы – G, катушки индуктивности – L, двигатели – М, резисторы – R, трансформаторы – Т, амперметры – РА, вольтметры PV, выключатели и переключатели – S и т.п.
При выполнении электрических схем применяют следующие линии:
Сплошную основную толщиной s = 0,2…0,6 мм в зависимости от форматов схемы и размеров графических обозначений для изображения линий электрической связи (провод, кабель, шина), всех видов обмоток, резисторов, конденсаторов и др.;
Сплошную утолщенную линию толщиной 2s (практически равную 0,6…0,8 мм) для обозначения сердечников и соединений с корпусом;
Штриховую линию толщиной s для изображения сеток электронных приборов;
Штриховую линию толщиной s/2, но не менее 0,2 мм для изображения линий механической связи в электрических схемах, линий экранировки.
Порядковые номера элементам в позиционных обозначениях присваивают, учитывая их расположение на схеме, обычно слева направо и сверху вниз
ОРГАНИЗАЦИОННЫЕ МЕРОПРИЯТИЯ, ОБЕСПЕЧИВАЮЩИЕ БЕЗОПАСНОСТЬ РАБОТ
Общие требования.
Ответственные за безопасность проведения работ, их права и обязанности
Организационными мероприятиями, обеспечивающими безопасность работ в электроустановках, являются:
оформление работ нарядом, распоряжением или перечнем работ, выполняемых в порядке текущей эксплуатации;
допуск к работе;
надзор во время работы;
оформление перерыва в работе, перевода на другое место, окончания работы.
Ответственными за безопасное ведение работ являются:
выдающий наряд, отдающий распоряжение, утверждающий перечень работ, выполняемых в порядке текущей эксплуатации;
ответственный руководитель работ;
допускающий;
производитель работ;
наблюдающий;
члены бригады.
Выдающий наряд, отдающий распоряжение определяет необходимость и возможность безопасного выполнения работы. Он отвечает за достаточность и правильность указанных в наряде (распоряжении) мер безопасности, за качественный и количественный состав бригады и назначение ответственных за безопасность, а также за соответствие выполняемой работе групп перечисленных в наряде работников, проведение целевого инструктажа ответственного руководителя (производителя работ, наблюдающего).
Право выдачи нарядов и распоряжений предоставляется работникам из числа административно - технического персонала организации, имеющим группу V - в электроустановках напряжением выше 1000 В и группу IV - в электроустановках напряжением до 1000 В.
В случае отсутствия работников, имеющих право выдачи нарядов и распоряжений, при работах по предотвращению аварий или ликвидации их последствий допускается выдача нарядов и распоряжений работниками из числа оперативного персонала, имеющими группу IV. Предоставление оперативному персоналу права выдачи нарядов и распоряжений должно быть оформлено письменным указанием руководителя организации.
Ответственный руководитель работ назначается, как правило, при работах в электроустановках напряжением выше 1000 В. В электроустановках напряжением до 1000 В ответственный руководитель, как правило, не назначается.
Ответственный руководитель работ отвечает за выполнение всех указанных в наряде мер безопасности и их достаточность, за принимаемые им дополнительные меры безопасности, необходимые по условиям выполнения работ, за полноту и качество целевого инструктажа бригады, в том числе проводимого допускающим и производителем работ, а также за организацию безопасного ведения работ.
Ответственными руководителями работ назначаются работники из числа административно - технического персонала, имеющие группу V в электроустановках напряжением выше 1000 В и группу IV в электроустановках до 1000 В. В тех случаях, когда отдельные работы (этапы работы) необходимо выполнять под надзором и управлением ответственного руководителя работ, выдающий наряд должен сделать запись об этом в строке "Отдельные указания" наряда (Приложение N 4 к настоящим Правилам).
Ответственный руководитель работ назначается при выполнении работ в одной электроустановке (ОРУ, ЗРУ):
с использованием механизмов и грузоподъемных машин при работах в электроустановках, а на ВЛ – припри работах в охранной зоне ВЛ;
с отключением электрооборудования, за исключением работ в электроустановках, где напряжение снято со всех токоведущих частей (п. 2.2.8 настоящих Правил), в электроустановках с простой и наглядной схемой электрических соединений, на электродвигателях и их присоединениях в РУ;
на КЛ и КЛС в зонах расположения коммуникаций и интенсивного движения транспорта;
по установке и демонтажу опор всех типов, замене элементов опор ВЛ;
в местах пересечения ВЛ с другими ВЛ и транспортными магистралями, в пролетах пересечения проводов в ОРУ;
по подключению вновь сооруженной ВЛ;
по изменению схем присоединений проводов и тросов ВЛ;
на отключенной цепи многоцепной ВЛ с расположением цепей одна над другой или числом цепей более 2, когда одна или все остальные цепи остаются под напряжением;
при одновременной работе двух и более бригад в данной электроустановке;
по пофазному ремонту ВЛ;
под наведенным напряжением;
без снятия напряжения на токоведущих частях с изоляцией человека от земли;
на оборудовании и установках СДТУ по устройству мачтовых переходов, испытанию КЛС, при работах с аппаратурой НУП (НРП), на фильтрах присоединений без включения заземляющего ножа конденсатора связи.
Необходимость назначения ответственного руководителя работ определяет выдающий наряд, которому разрешается назначать ответственного руководителя работ, и при других работах, помимо перечисленных.
Допускающий отвечает за правильность и достаточность принятых мер безопасности и соответствие их мерам, указанным в наряде или распоряжении, характеру и
месту работы, за правильный допуск к работе, а также за полноту и качество проводимого им целевого инструктажа.
Допускающие должны назначаться из числа оперативного персонала, за исключением допуска на ВЛ, при соблюдении условий, перечисленных в п. 2.1.11 настоящих Правил. В электроустановках напряжением выше 1000 В допускающий должен иметь группу IV, а в электроустановках до 1000 В - группу III.
Производитель работ отвечает:
за соответствие подготовленного рабочего места указаниям наряда, дополнительные меры безопасности, необходимые по условиям выполнения работ;
за четкость и полноту целевого инструктажа членов бригады;
за наличие, исправность и правильное применение необходимых средств защиты, инструмента, инвентаря и приспособлений;
за сохранность на рабочем месте ограждений, плакатов, заземлений, запирающих устройств;
за безопасное проведение работы и соблюдение настоящих Правил им самим и членами бригады;
за осуществление постоянного контроля за членами бригады.
Производитель работ, выполняемых по наряду в электроустановках напряжением выше 1000 В, должен иметь группу IV, а в электроустановках напряжением до 1000 В - группу III, кроме работ в подземных сооружениях, где возможно появление вредных газов, работ под напряжением, работ по перетяжке и замене проводов на ВЛ напряжением до 1000 В, подвешенных на опорах ВЛ напряжением выше 1000 B, при выполнении которых производитель работ должен иметь группу IV.
Производитель работ, выполняемых по распоряжению, может иметь группу III при работе во всех электроустановках, кроме случаев, оговоренных в п. п. 2.3.7., 2.3.13., 2.3.13., 2.3.15., 4.2.5., 5.2.1 настоящих Правил.
Наблюдающий должен назначаться для надзора за бригадами, не имеющими права самостоятельно работать в электроустановках.
Наблюдающий отвечает:
за соответствие подготовленного рабочего места указаниям, предусмотренным в наряде;
за чёткость и полноту целевого инструктажа членов бригады;
за наличие и сохранность установленных на рабочем месте заземлений, ограждений, плакатов и знаков безопасности, запирающих устройств приводов;
за безопасность членов бригады в отношении поражения электрическим током электроустановки.
Наблюдающим может назначаться работник, имеющий группу III.
Ответственным за безопасность, связанную с технологией работы, является работник, возглавляющий бригаду, который входит в ее состав и должен постоянно находиться на рабочем месте. Его фамилия указывается в строке "Отдельные указания" наряда.
Каждый член бригады должен выполнять требования настоящих Правил и инструктивные указания, полученные при допуске к работе и во время работы, а также требования инструкций по охране труда соответствующих организаций.
Письменным указанием руководителя организации должно быть оформлено предоставление его работникам прав: выдающего наряд, распоряжение; допускающего, ответственного руководителя работ; производителя работ (наблюдающего), а также права единоличного осмотра.
Допускается одно из совмещений обязанностей ответственных за безопасное ведение работ в соответствии с табл. 2.1.
Допускающий из числа оперативного персонала может выполнять обязанности члена бригады.
На ВЛ всех уровней напряжения допускается совмещение ответственным руководителем или производителем работ из числа ремонтного персонала обязанностей допускающего в тех случаях, когда для подготовки рабочего места требуется только проверить отсутствие напряжения и установить переносные заземления на месте работ без оперирования коммутационными аппаратами.
Таблица 2.1
| Ответственный работник | Совмещаемые обязанности |
| Выдающий наряд, отдающий распоряжение |
Ответственный руководитель работ Производитель работ Допускающий (в электроустановках, не имеющих местного оперативного персонала) |
|
Ответственный
руководитель |
Производитель работ Допускающий (в электроустановках, не имеющих местного оперативного персонала) |
| Производитель работ из числа оперативного – ремонтного персонала | Допускающий (в электроустановках с простой и наглядной схемой) |
|
Производитель
работ, |
Допускающий (в случаях, предусмотренных п. 8.5 настоящих Правил) |
© 2009 База Рефератов