
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по цифровым устройствам
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Учебное пособие: Микроконтроллеры AVR
Учебное пособие: Микроконтроллеры AVR
Микроконтроллеры AVR
Однокристальные микроконтроллеры находят широкие применение в самых разнообразных сферах: от измерительных приборов, фотоаппаратов и видеокамер, принтеров, сканеров и копировальных аппаратов до изделий электронных развлечений и всевозможной домашней техники.
Со времени появления первых микропроцессоров в 1970-х годах их сложность постоянно возрастала за счет появления новых аппаратных решений и добавления новых команд, предназначенных для решения новых задач. Так постепенно сложилась архитектура, получившая впоследствии название CISC (Complete Instruction Set Computers – компьютеры со сложным набором команд). В дальнейшем обозначилось и нашло активное развитие еще одно направление: архитектура RISC (Reduced Instruction Set Computers – компьютеры с сокращенным набором команд). Именно к этой архитектуре относятся микроконтроллеры AVR от компании Atmel и PIC от компании Microchip, которым посвящена эта книга.
Основное преимущество RISC-процессоров заключается в том, что они просты, выполняют ограниченный набор команд, и, как следствие, очень быстродействующие. Это позволяет снизить стоимость и сложность их программирования.
Обратной стороной RISC-архитектуры стала необходимость создания дополнительных команд на ассемблере, которые у CISC-устройств реализованы в аппаратной части. Например, вместо того, чтобы просто вызвать команду деления, которая характерна для устройств CISC, разработчику, имеющему дело с RISC-процессором, приходится применять несколько последовательных команд вычитания. Однако подобный недостаток с лихвой компенсируется ценой и скоростью работы RISC-устройств. Кроме того, если создавать программы на языке С, то подобные проблемы вообще перестают иметь какое-либо значение для разработчика, поскольку они решаются компилятором, который автоматически генерирует весь недостающий ассемблерный код.
На заре возникновения микропроцессоров разработка программного обеспечения происходила исключительно на том или ином языке ассемблера, ориентированном на конкретное устройство. По сути, такие языки представляли собой символьные мнемоники соответствующих машинных кодов, а перевод мнемоники в машинный код выполнялся транслятором. Однако главный недостаток ассемблерных языков заключается в том, что каждый из них привязан к конкретному типу устройств и логике его работы. Кроме того, ассемблер сложен в освоении, что требует достаточно больших усилий для его изучения, которые, к тому же, оказываются потраченными впустую, если впоследствии потребуется перейти на использование микроконтроллеров других производителей.
Язык С, являясь языком высокого уровня, лишен подобных недостатков и может использоваться для программирования любого микропроцессора, для которого есть компилятор с языка С. В языке С все низкоуровневые операции, выполняемые компьютерами, представлены в виде абстрактных конструкций, позволяющих разработчикам сосредоточиться на программировании одной лишь логики, не заботясь о машинном коде. Изучив язык С, можно легко переходить от одного семейства микроконтроллеров к другому, тратя гораздо меньше времени на разработку.
1. Архитектура микроконтроллеров AVR и PIC
В общем, все микроконтроллеры построены по одной схеме. Система управления, состоящая из счетчика команд и схемы декодирования, выполняет считывание и декодирование команд из памяти программ, а операционное устройство отвечает за выполнение арифметических и логических операций; интерфейс ввода/вывода позволяет обмениваться данными с периферийными устройствами; и, наконец, необходимо иметь запоминающее устройство для хранения программ и данных (рис. 1.1).
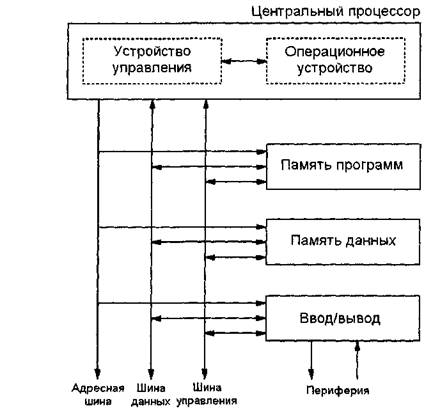
Рис. 1.1. Обобщенная структура микроконтроллера
Будем рассматривать микроконтроллеры в общем, не привязываясь к какому-либо конкретному типу микроконтроллеров AVR, поэтому ниже будут рассмотрены только общие для большинства микроконтроллеров особенности архитектуры памяти, вопросы ввода/вывода, обработки прерываний, сброса и др.
Память микроконтроллеров AVRВ микроконтроллерах AVR память реализована по Гарвардской архитектуре, что подразумевает разделение памяти команд и данных. Это означает, что обращение к командам осуществляется независимо от доступа к данным. Преимуществом такой организации является повышение скорости доступа к памяти.
Память данных
Память данных предназначена для записи/чтения данных, используемых программами. Является энергозависимой, то есть, при отключении питания микроконтроллера все хранимые в ней данные, будут потеряны. В микроконтроллерах AVR память данных имеет более развитую структуру по сравнению с микроконтроллерами PIC, что показано на рис. 2.1.
Здесь и далее шестнадцатеричные числа будут представлены в форме, принятой в языке С: с префиксом 0х.
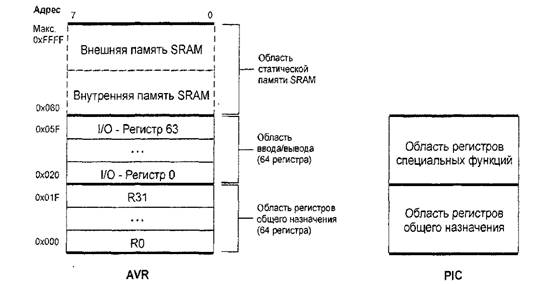
Рис. 2.1. Структура памяти данных в микроконтроллерах AVR и PIC
Область статической памяти SRAM (Static Random Access Memory) обозначена на рис. 2.1 пунктиром, поскольку используется не всеми микроконтроллерами AVR (это относится как к внутренней, так и к внешней SRAM). Ее начальный адрес – 0x060, а верхний адрес – разный в различных устройствах.
В некоторых микроконтроллерах AVR можно увеличивать пространство памяти SRAM посредством подключения внешних блоков памяти вплоть до 64 Кбайт, однако для этого приходится пожертвовать портами А и С, которые в этом случае применяются для передачи данных и адресов.
Регистры общего назначения
Область регистров общего назначения (рабочих регистров) предназначена для временного хранения переменных и указателей, используемых процессором для выполнения программ. В микроконтроллерах AVR она состоит из 32 восьмиразрядных регистров (диапазон адресов 0x000 – 0x01F). В микроконтроллерах PIC регистры общего назначения также восьмиразрядные, однако их количество и диапазон адресов зависят от конкретного типа устройства.
В программах, написанных на языке С, непосредственное обращение к регистрам общего назначения обычно не требуется, если только не используются фрагменты на языке ассемблера.
Регистры специальных функций микроконтроллеров PIC
Регистры специальных функций используются в микроконтроллерах PIC для управления различными операциями. Как и в случае с регистрами общего назначения, их количество и адресация отличаются от устройства к устройству. В программах, написанных на языке С, непосредственное обращение к регистрам специальных функций обычно не требуется, если только не используются фрагменты на языке ассемблера.
Область ввода/вывода микроконтроллеров AVR
Область ввода/вывода микроконтроллеров AVR содержит 64 регистра, используемых для управления или хранения данных периферийных устройств. К каждому из этих регистров можно обращаться по адресу ввода/вывода (начиная с 0x000) или по адресу SRAM (в этом случае к адресу ввода/вывода следует прибавить 0x020). В программах на языке С обычно используются условные имена регистров ввода/вывода, а адреса имеют значение только для программ на языке ассемблера.
Имена, адреса ввода/вывода и SRAM, а также краткое описание регистров из области ввода/вывода микроконтроллеров AVR представлены в табл. 2.1. При этом следует отметить, что в различных моделях микроконтроллеров некоторые из перечисленных регистров не используются, а адреса, не указанные в табл. 2.1, зарезервированы компанией Atmel для использования в будущем.
Таблица 2.1. Описание регистров из области ввода/вывода
|
Имя регистра |
Адрес ввода/ вывода | Адрес SRAM | Описание |
|
| ACSR | 0x08 | 0x28 | Регистр управления и состояния аналогового компаратора |
|
| UBRR | 0x09 | 0x29 | Регистр скорости передачи данных через UART |
|
| UCR | 0х0А | 0х2А | Регистр управления приемопередатчиком UART |
|
| USR | 0x0В | 0x2В | Регистр состояния приемопередатчика UART |
|
| UDR | 0х0С | 0х2С | Регистр данных приемопередатчика UART |
|
| SPCR | 0x0D | 0x2D | Регистр управления интерфейсом SPI |
|
| SPSR | 0х0Е | 0х2Е | Регистр состояния интерфейса SPI |
|
| SPDR | 0x0F | 0x2F | Регистр ввода/вывода данных интерфейса SPI |
|
| PIND | 0x10 | 0x30 | Выводы порта D |
|
| DDRD | 0x11 | 0x31 | Регистр направления передачи данных порта D |
|
| PORTD | 0x12 | 0x32 | Регистр данных порта D |
|
| PINC | 0x13 | 0x33 | Выводы порта С |
|
| DDRC | 0x14 | 0x34 | Регистр направления передачи данных порта С |
|
| PORTC | 0x15 | 0x35 | Регистр данных порта С |
|
| PINB | 0x16 | 0x36 | Выводы порта В |
|
| DDRB | 0x17 | 0x37 | Регистр направления передачи данных порта В |
|
| PORTB | 0x18 | 0x38 | Регистр данных порта В |
|
| PINA | 0x19 | 0x39 | Выводы порта А |
|
| DDRA | 0x1А | 0х3А | Регистр направления передачи данных порта А | |
| PORTA | 0x1В | 0х3В | Регистр данных порта А | |
| EECR | 0x1С | 0х3С | Регистр управления памяти EEPROM | |
| EEDR | 0x1D | 0x3D | Регистр данных памяти EEPROM | |
| EEARL | 0x1Е | 0х3Е | Регистр адреса памяти EEPROM (младший байт) | |
| EEARH | 0x1F | 0x3F | Регистр адреса памяти EEPROM (старший байт) | |
| WDTCR | 0x21 | 0x41 | Регистр управления сторожевым таймером | |
| ICR1L | 0x24 | 0x44 | Регистр захвата таймера/счетчика Т/С1 (младший байт) | |
| ICR1H | 0x25 | 0x45 | Регистр захвата таймера/счетчика Т/С1 (младший байт) | |
| OCR1BL | 0x28 | 0x48 | Регистр сравнения В таймера Т/С1 (младший байт) | |
| OCR1BH | 0x29 | 0x49 | Регистр сравнения В таймера Т/С1 (старший байт) | |
| OCR1AL | 0х2А | 0х4А | Регистр сравнения А таймера Т/С1 (младший байт) | |
| OCR1AH | 0x2В | 0x4В | Регистр сравнения А таймера Т/С1 (старший байт) | |
| TCNT1L | 0х2С | 0х4С | Счетный регистр таймера/счетчика Т/С1 (младший байт) | |
| TCNT1H | 0x2D | 0x4D | Счетный регистр таймера/счетчика Т/С1 (старший байт) | |
| TCCR1B | 0x2Е | 0х4Е | Регистр управления В таймера/счетчика Т/С1 | |
| TCCR1A | 0x2F | 0x4F | Регистр управления А таймера/счетчика Т/С1 | |
| TCNT0 | 0x32 | 0x52 | Счетный регистр таймера/счетчика Т/С0 | |
| TCCR0 | 0x33 | 0x53 | Регистр управления таймера/счетчика Т/С0 | |
| MCUCR | 0x35 | 0x55 | Регистр управления микроконтроллером | |
| TIFR | 0x38 | 0x58 | Регистр флагов прерываний от таймеров/счетчиков | |
| TIMSK | 0x39 | 0x59 | Регистр маскирования прерываний от таймеров | |
| GIFR | 0х3А | 0х5А | Общий регистр флагов прерываний | |
| GIMSK | 0х3В | 0x5В | Общий регистр маскирования прерываний | |
| SPL | 0x3D | 0x5D | Указатель стека (младший байт) | |
| SPH | 0х3Е | 0х5Е | Указатель стека (старший байт) | |
| SREG | 0x3F | 0x5F | Регистр состояния | |
Регистр состояния SREG микроконтроллеров AVR
Регистр состояния содержит флаги условий микроконтроллеров AVR и располагается в области ввода/вывода по адресу $3F (адрес SRAM – $5F). После подачи сигнала сброса он инициализируется нулями.
В микроконтроллерах AVR для обозначения результата выполнения операций используются восемь различных флагов:
-разряд 0 (С) – флаг переноса (Carry); указывает на переполнение (перенос) после выполнения арифметической или логической операции;
-разряд 1 (Z) – нулевой флаг (Zero); всегда устанавливается, если результат арифметической или логической операции равен нулю; сбрасывается, если результат операции не равен нулю;
-разряд 2 (N) – флаг отрицательного результата (Negative); указывает на отрицательный результат после выполнения арифметической или логической операции;
-разряд 3 (V) – флаг переполнения при вычислениях в дополнительных кодах (Two's complement Overflow); поддерживает арифметику дополнительных кодов (арифметика кодов с дополнением до двух); устанавливается, если при выполнении соответствующей операции происходит переполнение, в противном случае – сбрасывается;
-разряд 4 (S) – флаг знака (Sign); S = NÅV – связь флагов N и V с помощью операции "Исключающее ИЛИ"; флаг знака может применяться для определения фактического результата арифметической операции;
-разряд 5 (Н) – флаг половинного переноса (Half Carry); указывает на переполнение в младшем полубайте (разряды 0...3 байта данных); устанавливается, когда происходит перенос из младшего полубайта в старший, в противном случае – сбрасывается;
-разряд 6 (Т) – флаг копирования (Transfer or Copy); предназначен для свободного применения программистом (например, в качестве буфера);
-разряд 7 (I) – общее разрешение прерываний (Global Interrupt); если прерывания, как таковые, должны быть разрешены, то должен быть установлен разряд 7 регистра состояния (в лог. 1).
Внутренняя и внешняя память SRAM микроконтроллеров AVR
Память SRAM микроконтроллеров AVR предназначена для хранения тех данных, которые не помещаются в рабочих регистрах, а также для организации программного стека. Данные обычно сохраняют в SRAM, начиная с первых адресов, а стеку соответствуют верхние адреса.
Если объема внутренней памяти SRAM недостаточно, то в некоторых микроконтроллерах AVR его можно увеличить до 64 Кбайт посредством подключения внешних блоков памяти. Для этого в регистре MCUCR (адрес в области ввода/вывода – $35, адрес в SRAM – $55) следует установить в лог. 1 разряд SRE (разряд 7). После установки этого разряда порты А и С будут выступать в качестве шины адреса и шины данных, а выводы 7 и 6 порта D – в качестве управляющих сигналов чтения /RD и, соответственно, записи /WR для внешней памяти SRAM), независимо от того, какие направления передачи данных установлены для этих портов в соответствующих регистрах направления передачи данных.
Стек
Стек – это особая область памяти данных, используемая процессором для временного хранения адресов возврата из подпрограмм, промежуточных результатов вычислений и др. В микроконтроллерах PIC и некоторых микроконтроллерах AVR стек реализован аппаратно – для этого выделено отдельное запоминающее устройство фиксированного объема в несколько (или несколько десятков) байт. Для микроконтроллеров AVR компиляторы языка С (например, при обращении к подпрограммам) могут также создавать один или более стеков программно, начиная с верхних адресов области SRAM.
Стек действует по принципу LIFO "Last In, First Out", что означает "последним вошел, первым вышел". Это означает, что новые данные вначале помещаются на вершину (первый уровень) стека, а затем, с поступлением следующих данных, "проталкиваются" на его нижние уровни. Извлечение из стека происходит в обратном порядке: вначале считываются данные, помещенные последними на вершину, после чего данные, размещенные на нижних уровнях, как бы "выталкиваются" на один уровень вверх. Ячейка памяти, которая является в данный момент вершиной стека, адресуется указателем стека (для AVR регистровой парой SPL, SPH).
Поскольку область памяти данных, отводимая для программного стека, ограничивается только объемом памяти SRAM, при написании программ следует следить за тем, чтобы стек не становился слишком большим, затирая полезные данные.
Память программ
Память программ как в микроконтроллерах AVR, так и в микроконтроллерах PIC реализована по технологии Flash–EPROM, которая подразумевает программирование пользователем и вытирание электрическим способом. Размер этой памяти варьируется в зависимости от микроконтроллера и обычно составляет несколько Кбайт командных слов.
Флэш–память является энергонезависимой, то есть, сохраняет записанную в нее информацию даже после отключения питания микроконтроллера. Несмотря на то, что память этого типа – программируемая, для записи в нее используются только внешние аппаратные средства, поэтому с точки зрения программиста можно сказать, что память программ доступна только для чтения.
Адресация команд в памяти программ реализуется с помощью специального регистра – счетчика команд, разрядность которого определяет допустимый размер этой памяти. Разрядность ячеек памяти программ, в зависимости от типа микроконтроллера, может составлять 14…16 бит.
Кроме того, следует отметить, что в микроконтроллерах PIC в первых ячейках памяти программ (начиная с адреса 0x0000) содержатся векторы (адреса перехода) сброса и прерываний.
Память EEPROM микроконтроллеров AVR
Многие микроконтроллеры AVR оборудованы встроенной памятью EEPROM – электрически перезаписываемой энергонезависимой памятью. Хотя эта память и допускает запись, она редко используется для хранения программных переменных, поскольку, во-первых, медленнодействующая, и, во-вторых, имеет ограниченный (хотя и довольно большой) цикл перезаписи.
Учитывая вышесказанное, память EEPROM используют, преимущественно, для хранения данных, которые не должны быть потеряны даже при потере питания. Это очень удобно, к примеру, при калибровке измерительных приборов, работающих под управлением микроконтроллеров, у которых в памяти EEPROM в процессе настройки сохраняются параметры корректировки. Благодаря этому, в большинстве случаев полностью отпадает необходимость в настроечных потенциометрах и триммерах.
В отличие от флэш-памяти, для записи/чтения памяти EEPROM нет необходимости в специальном программаторе – эти операции доступны программно и допускают побайтную передачу данных с помощью регистра управления EECR, регистра данных EEDR и регистровой пары EEARL, EEARH, определяющей адрес ячейки памяти (см. табл. 1.1).
Запись байта данных в память EEPROM осуществляется по следующей схеме:
-удостовериться, что в разряде EEWE (разряд 1) регистра EECR находится лог. 0 (разрешение записи);
-записать адрес ячейки EEPROM в регистр EEAR;
-записать байт данных в регистр EEDR;
-установить в лог. 1 разряд EEMWE (разряд 2) регистра EECR;
-установить в лог. 1 разряд ЕЕWE (разряд 1) регистра EECR, чтобы активизировать процесс записи.
По окончанию цикла программирования разряд EEWE аппаратно автоматически сбрасывается в лог. 0. Программа пользователя должна непрерывно опрашивать этот разряд, ожидая появления лог. 0, прежде чем приступить к программированию следующего байта.
Чтение байта данных из памяти EEPROM осуществляется по такой схеме:
-записать адрес ячейки EEPROM в регистр EEAR;
-установить в лог. 1 разряд EERE (разряд 0) регистра EECR, чтобы активизировать процесс чтения;
-по окончанию считывания разряда EERE аппаратное обеспечение считывает требуемый байт в регистр EEDR, после чего уже нет необходимости вновь опрашивать разряд EERE, поскольку считывание длится только один цикл такта системной синхронизации.
Перед началом операции чтения программа пользователя должна постоянно опрашивать разряд EEWE и ждать появления лог. 0. Если во время программирования памяти EEPROM в соответствующий регистр будет записан новый адрес или данные, то еще продолжающийся процесс программирования будет прерван, и результат будет неопределенным!
Обработка прерываний
Прерывания – это вызовы определенных функций, генерируемые, главным образом, аппаратной частью микроконтроллера. В результате прерывания выполнение программы останавливается, и происходит переход к соответствующей подпрограмме обработки прерывания.
Прерывания бывают внутренними и внешними. Источниками внутреннего прерывания являются встроенные модули микроконтроллера (например, таймер/счетчик или сторожевой таймер). Внешние прерывания вызываются сбросом (сигнал на выводе RESET) или сигналами предустановленного уровня на выводах INT. К примеру, в микроконтроллерах AVR за характер сигналов на выводах INT0/INT1, вызывающих прерывание, определяется с помощью разрядов регистра управления MCUCR: ISC00 (разряд 0), ISC01 (разряд 1) для входа INT0; ISC 10 (разряд 2), ISC11 (разряд 3) – для входа INT1 (табл. 3.1 и табл. 3.2).
Таблица 3.1. Выбор способа активизации прерывания по входу INT0
| Разряд ISC01 | Разряд 1SC00 | Описание |
| 0 | 0 | Прерывание вызывается по уровню лог. 0 на входе INT0 |
| 1 | 0 | Прерывание вызывается по ниспадающему фронту сигнала INT0 |
| 1 | 1 | Прерывание вызывается по нарастающему фронту сигнала INT0 |
Таблица 3.2. Выбор способа активизации прерывания по входу INT1
| Разряд ISC11 | Разряд ISC10 | Описание |
| 0 | 0 | Прерывание вызывается по уровню лог. 0 на входе INT1 |
| 1 | 0 | Прерывание вызывается по нарастающему фронту сигнала INT1 |
| 1 | 1 | Прерывание вызывается по ниспадающему фронту сигнала INT1 |
В ряде микроконтроллеров PIC выбор фронта для активизации прерывания по входу INT определяется состоянием разряда 6 регистра OPTION: лог. 1 в этом разряде соответствует прерывание по нарастающему, а лог. 0 – по ниспадающему фронту сигнала. Для установки этого разряда в языке С обычно используют специальные функции.
В микроконтроллерах AVR всем прерываниям, включая сброс, поставлен в соответствие собственный вектор прерывания – адрес в начальной области памяти программ, по которому компилятор размещает команду перехода к подпрограмме обработки прерывания. Перечень векторов прерывания в некоторых моделях микроконтроллеров AVR может выглядеть следующим образом (табл. 3.3). В микроконтроллерах AVR все прерывания имеют одинаковый приоритет, и в случае одновременного возникновения двух прерываний первым обрабатывается прерывание с меньшим номером вектора.
Таблица 3.3. Векторы прерываний
|
Адрес в памяти программ |
Источник прерывания | Описание |
| 0x0000 | RESET | Сигнал сброса |
| 0x0001 | INT0 | Внешний запрос на прерывание по входу INT0 |
| 0x0002 | INT1 | Внешний запрос на прерывание по входу INT1 |
| 0x0003 | Т/С1 | Захват по таймеру/счетчику Т/С1 |
| 0x0004 | Т/С1 | Совпадение с регистром сравнения А таймера Т/С1 |
| 0x0005 | Т/С1 | Совпадение с регистром сравнения В таймера Т/С1 |
| 0x0006 | Т/С1 | Переполнение таймера/счетчика Т/С1 |
| 0x0007 | Т/С0 | Переполнение таймера/счетчика Т/С0 |
| 0x0008 | SPI | Завершение передачи данных по интерфейсу SPI |
| 0x0009 | UART | Прием байта приемопередатчиком UART завершен |
| 0х000А | UART | Регистр данных приемопередатчика UART пуст |
| 0x000В | UART | Передача данных приемопередатчиком UART завершена |
| 0х000С | ANA_COMP | Прерывание от аналогового компаратора |
В микроконтроллерах PIC источники прерывания, кроме RESET, не рассматриваются в отдельности, им обычно соответствует один вектор, а в некоторых моделях – два вектора для прерываний с различной приоритетностью. Определять, какое именно прерывание требует обслуживания, – задача программиста, и многие компиляторы с языка С предоставляют для этой цели готовые функции, освобождающие от необходимости самому "вычислять" источник прерывания.
В момент возникновения прерывания в стек помещается адрес возврата – адрес команды, которая должна быть выполнена первой после выхода из подпрограммы обработки прерывания. В результате выполнения последней ассемблерной команды подпрограммы обработки прерывания (для микроконтроллеров AVR – это команда reti, а для микроконтроллеров PIC – retfie) адрес возврата извлекается из стека в счетчик команд, и выполнение программы продолжается.
Управление прерываниями в микроконтроллерах AVR
В микроконтроллерах AVR за управление прерываниями отвечают, главным образом, четыре регистра:
-GIMSK (General Interrupt Mask Register) – разрешает или запрещает внешние прерывания по входу INT0/INT1;
-GIFR (General Interrupt Flag Register) – регистр флагов внешних прерываний;
-TIMSK (Timer/Counter Interrupt Mask Register) – регистр маскирования прерываний от таймера/счетчика Т/С0 и Т/С1;
-TIFR (Timer/Counter Interrupt Flag Register) – регистр флагов прерываний от таймеров/счетчиков.
О состоянии прерывания сигнализирует соответствующий флаг, который устанавливается или сбрасывается в регистре флагов. Даже если в регистре маски прерываний установлен соответствующий отдельный разряд разрешения прерывания, то прерывания могут активизироваться только тогда, когда в регистре состояния SREG установлен разряд общего разрешения прерываний I (разряд 7). Если это имеет место, и наступает прерывание, то выполнение программы ответвляется по соответствующему адресу (см. табл. 1.4) и разряд общего разрешения прерываний I в регистре SREG сбрасывается в состояние лог. 0, блокируя тем самым последующие прерывания. Если требуется прервать подпрограмму другим прерыванием, то после входа в подпрограмму обработки прерывания программа пользователя должна установить флаг I в лог. 1.
Вместе с входом в подпрограмму обработки прерывания аппаратно сбрасывается также и соответствующий флаг, вызвавший прерывание. Некоторые флаги прерываний могут быть сброшены самим пользователем посредством установки соответствующего флага в лог. 1.
Регистр GIMSK
Регистр GIMSK (рис. 3.1), расположенный в области ввода/вывода по адресу 0x003В (адрес в SRAM – 0x005В), используется для разрешения внешних прерываний.
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| INT1 | INT0 | – | – | – | – | – | – |
Рис. 3.1. Структура регистра GIMSK микроконтроллеров AVR
Если разряд INT1/INT0 установлен в лог. 1, то внешнее прерывание по входу INT1/INT0 будет разрешено до тех пор, пока установлен в лог. 1 разряд I в регистре состояния SREG.
Регистр GIFR
Состояние внешнего прерывания определяется по регистру GIFR (рис. 3.2), который расположен в области ввода/вывода по адресу 0х003А (адрес SRAM – 0х005А).+
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| INTF1 | INTF0 | – | – | – | – | – | – |
Рис. 3.2. Структура регистра GIFR микроконтроллеров AVR
Флаг INTF1/INTF0 устанавливается в лог. 1, если возникает внешнее прерывание по сигналу на выводе INT1/INT0. При входе в подпрограмму обработки прерывания этот разряд переводится аппаратно в исходное состояние лог. 0.
Регистры TIMSK и TIFR
Регистр TIMSK (рис. 3.3), расположенный в области ввода/вывода по адресу 0x0039 (адрес в SRAM – 0x0059), используется для разрешения прерываний от таймеров/счетчиков.
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| TOIE1 | OCIE1A | OCIE1B | – | TICIE1 | – | TOIE0 | – |
Рис. 3.3. Структура регистра TIMSK микроконтроллеров AVR
Состояние прерываний, имеющих отношение к таймерам/счетчикам микроконтроллеров AVR, определяется по регистру TIFR (рис. 3.4), который расположен в области ввода/вывода по адресу 0x0038 (адрес SRAM 0x0058).
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| TOV1 | OCF1A | OCF1B | – | ICF1 | – | TOV0 | – |
Рис. 3.4. Структура регистра TIFR микроконтроллеров AVR
Когда разряд TOIE1 и разряд I в регистре состояния SREG установлены в лог. 1, то разрешено прерывание при переполнении Т/С1. В случае переполнения в регистре TIFR устанавливается флаг TOV1.
Если разряд OCIE1A и разряд I в регистре состояния SREG установлены в лог. 1, то разрешено прерывание при совпадении содержимого регистра сравнения А с текущим состоянием Т/С1. В случае совпадения, в регистре TIFR устанавливается флаг OCF1 А.
Если разряд OCIE1B и разряд I в регистре состояния SREG установлены в лог. 1, то разрешается прерывание при совпадении содержимого регистра сравнения В с текущим состоянием Т/С1. В случае совпадения, в регистре TIFR устанавливается флаг OCF1B.
Если разряд TICIE1 и разряд I в регистре состояния SREG установлены в лог. 1, то разрешается прерывание при выполнении условия захвата. Когда возникает срабатывание по захвату, в регистре TIFR устанавливается флаг ICF1.
Если разряд TOIE0 и разряд I в регистре состояния SREG установлены в лог. 1, то разрешается прерывание при переполнении таймера/счетчика Т/СО. В таком случае, в регистре TIFR устанавливается флаг TOV0.
Установка в лог. 1 одного из флагов в регистре TIFR приводит к переходу по соответствующему вектору прерывания. При входе в подпрограмму обработки прерывания, флаг в регистре TIFR аппаратно сбрасывается в лог. 0.
Управление прерываниями в микроконтроллерах PIC
В микроконтроллерах PIC управление прерываниями реализовано с помощью регистров специальных функций, и отличается от устройства к устройству. К примеру, в микроконтроллерах PIC12C6x, PIC14000, Р1С16х для этой цели используются регистры INTCON (рис. 3.5), PIE и PIR, а программы обработки прерываний всегда начинают исполняться с адреса 0x004.
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| GIE | PEIE | TOIE | INTE | RBIE | TOIF | INTF | RBIF |
Рис. 3.5. Регистр INTCON микроконтроллеров PtC12C6x, PIC14000, Р1С16х
Разряд GIE – это флаг общего разрешения прерываний. Если он установлен в лог. 1, то все немаскированные прерывания разрешены, если же он сброшен в лог. 0, то все прерывания запрещены.
Разряд PEIE регистра INTCON может использоваться в качестве флага разрешения всех прерываний от периферии, определяемых с помощью регистров PIE и PIR.
Флаг TOIE разрешает (лог. 1) или запрещает (лог. 0) прерывания при переполнении таймера TMR0), а флаг TOIF определяет запрос на соответствующее прерывание.
Разряд INTE – флаг разрешения внешнего прерывания по входу INT, а разряд INTF – флаг запроса на прерывания по этому входу. Аналогичное значение, но для порта В имеют разряды RBIE и RBIF.
Регистр PIE содержит флаги разрешения прерываний от периферийных устройств, а регистр PIR – соответствующие флаги запросов на прерывание. Позиции разрядов в этих регистрах для различных микроконтроллеров отличаются.
Сброс
Сброс – это, по сути, одна из форм прерываний, вызывающая перезапуск микроконтроллера (аппаратная инициализация всех регистров управления и периферийных устройств и выполнение программы, начиная с адреса 0x0000). Вектор сброса всегда расположен самым первым.
Возможны следующие варианты сброса:
-сброс при включении питания;
-внешний сброс – сигнал сброса подается на соответствующий вывод микроконтроллера;
-сброс от сторожевого таймера – микроконтроллер сбрасывается по истечению времени, заданного сторожевым таймером, если этот таймер был разрешен.
"Спящие" режимы процессора
Микроконтроллеры AVR и PIC допускают переход в "спящий" режим, когда происходит временное отключение генератора тактовых импульсов. В таком режиме потребление энергии сведено к минимуму, а выход из него осуществляется при получении запроса на прерывание.
Переход в "спящий" режим реализуется по ассемблерной команде sleep. В случае микроконтроллеров AVR, при этом должен быть предварительно установлен в лог. 1 разряд SE (разряд 5) регистра управления MCUCR.
Когда во время режима пониженного энергопотребления происходит прерывание, центральный процессор выходит из "спящего" режима, выполняет подпрограмму обработки прерывания и продолжает выполнение программы с команды, следующей после команды sleep. Если во время режима пониженного энергопотребления поступает сигнал сброса, то центральный процессор выходит из "спящего" режима и продолжает выполнение программы с команды, расположенной по адресу $000 в области команд.
Для микроконтроллеров AVR может быть выбран один из двух "спящих" режимов:
-В ждущем режиме (Idle Mode) работа процессора приостанавливается, но таймер/счетчик, сторожевой таймер, система прерываний и тактирования остаются активными. Благодаря этому, центральный процессор может быть возвращен в обычный режим работы с помощью сторожевого таймера, таймера/счетчика или внешнего прерывания.
-В режиме пониженного энергопотребления (Power Down Mode) системный осциллятор (а значит и весь микроконтроллер) находится в отключенном состоянии. В таком режиме с помощью внутреннего RC-генератора колебаний может включаться лишь сторожевой таймер со своим собственным обеспечением тактовой частотой. Активный сторожевой таймер по истечении времени задержки опять переводит микроконтроллер в нормальное состояние. Если сторожевой таймер также отключен, то в нормальное состояние его может перевести только внешний сигнал сброса или внешнее прерывание.
Выбор одного из "спящих" режимов в микроконтроллерах AVR осуществляется с помощью разряда SM (разряд 4) регистра управления MCUCR. Если разряд SM установлен в лог. 1, то микроконтроллер переводится в режим пониженного энергопотребления последующей командой sleep, если же разряд SM сброшен в лог. 0, то последующей микроконтроллер переводится в ждущий режим в том случае, если ранее в регистре MCUCR был установлен разряд SE.
Таймеры/счетчики
Таймеры/счетчики – это, наиболее часто используемые модули микроконтроллеров. С их помощью можно измерять промежутки времени и частоту, определять ширину импульсов, вычислять скорость и т.д. Хотя они и используются для измерения времени, на самом деле речь идет об обычных двоичных счетчиках.
В микроконтроллерах AVR и PIC используются как 8-ми, так и 16-ти разрядные таймеры/счетчики. Разрядность определяет момент переполнения счетчика (возврат в нулевое состояние). Так, для 8-разрядного счетчика переполнение наступает, когда счет достигает 255, а для 16-разрядного – 65535.
Количество таймеров/счетчиков и их разрядность в микроконтроллерах отличается в зависимости от модели, и потому в данном разделе будут рассмотрены только общие вопросы, имеющие отношение к использованию таймеров/счетчиков.
Если таймер/счетчик функционирует в качестве счетчика, то он подсчитывает число импульсов, поступающих на определенный вход микроконтроллера. В этом случае соответствующий вывод должен быть сконфигурирован в инициализационной части программы как вход.
В случае использования в качестве таймера, частота тактирования таймера/счетчика является производной величиной от такта системной синхронизации внутреннего кварцевого осциллятора. При этом таймеры/счетчики используют в качестве тактового сигнала разделенный такт системной синхронизации. Коэффициент деления предварительного делителя частоты может настраиваться индивидуально для каждого из таймеров с помощью мультиплексора, управляемого разрядами из регистра управления таймера/счетчика.
Таймеры/счетчики микроконтроллеров AVR
В микроконтроллерах AVR могут использоваться следующие таймеры/счетчики:
-8-ти или 16-ти разрядный Т/С0;
-16-разрядный Т/С1;
-8-ми или 16-ти разрядный Т/С2.
Регистры управления в этом случае называются TCCR0, TCCR1 и TCCR2 (расположены в области ввода/вывода), а режим работы и коэффициент деления частоты осциллятора определяется с помощью разрядов CSx2, CSxl и CSx0 этих регистров. К примеру, для таймеров/счетчиков Т/С0 и Т/С1 выбор режима и входного такта можно определить с помощью комбинаций разрядов, представленных в табл. 4.1.
Таблица 4.1. Выбор режима и входного такта для Т/С0 и Т/С1
| CSx2 | CSx1 | CSxO | Описание |
| 0 | 0 | 0 | Останов |
| 0 | 0 | 1 | Режим "Таймер", такт = такт системной синхронизации |
| 0 | 1 | 0 | Режим "Таймер", такт = такт системной синхронизации / 8 |
| 0 | 1 | 1 | Режим "Таймер", такт = такт системной синхронизации / 64 |
| 1 | 0 | 0 | Режим "Таймер", такт = такт системной синхронизации / 256 |
| 1 | 0 | 1 | Режим "Таймер", такт = такт системной синхронизации /1024 |
| 1 | 1 | 0 | Режим "Счетчик", такт внешний на входе Т0 (Т1), активный фронт сигнала – ниспадающий |
| 1 | 1 | 1 | Режим "Счетчик", такт внешний на входе Т0 (Т1), активный фронт сигнала – нарастающий |
Для Т/С2 комбинации разрядов CS22, CS21 и CS20 могут иметь разное значение для различных моделей микроконтроллеров.
Т/С0
Схема работы таймера/счетчика Т/С0, представлена на рис. 4.1.
Как только с помощью разрядов CS00, CS01 и CS02 регистра TCCR0 (адрес 0x33 в области ввода/вывода, адрес 0x53 в SRAM) для делителя частоты будет установлена комбинация, отличная от 000, таймер/счетчик Т/С0 по каждому импульсу, поступающему на тактовый вход, начинает увеличивать на единицу содержимое регистра TCNT0 (адрес 0x32 в области ввода/вывода, адрес 0x52 в SRAM). Когда состояние счетчика в регистре TCNT0 изменяется с 0xFF на 0x00, в регистре TIFR (адрес 0x38 в области ввода/вывода) устанавливается флаг переполнения TOV0.
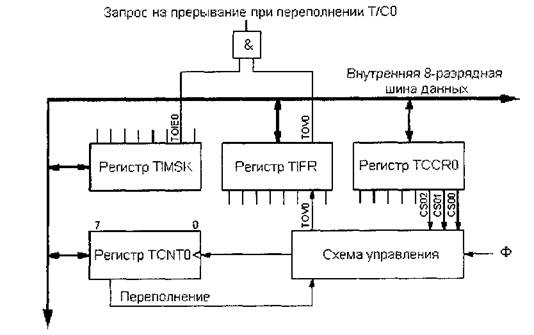
Рис. 4.1. Схема таймера/счетчика Т/С0
Кроме разрядов CS00, CS01 и CS02 регистра TCCR0 (разряды 0-2), никакие другие разряды этого регистра не используются.
Таймер/счетчик Т/С0 хорошо подходит для оценки временных интервалов. Для этого в ходе выполнения программы в регистр TCNT0 записывается исходное значение. Затем может быть запущен Т/С0 с требуемым входным тактом. Программа ожидает появления в регистре TIFR флага переполнения TOV0, указывающего на то, что требуемое время истекло.
Предположим частота системной синхронизации составляет 4 МГц, а некоторое действие должно выполняться программой каждые 0,5 с. В этом случае можно воспользоваться делением частоты на 8, что соответствует частоте тактирования 500 кГц или 2 мкс. Таким образом, на подсчет 256 тактовых импульсов счетчику потребуется 512 мкс. Это значение должно быть кратно 500 мкс, чтобы с помощью множителя 1000 в программе можно было реализовать требуемое действие в точности с периодом 500 мс. Для этого в счетчик перед началом каждого счета должно быть загружено значение 6, чтобы до переполнения выполнялся подсчет не 256, а только 250 тактовых импульсов.
Т/С1
16-разрядный таймер/счетчик Т/С1 гораздо сложнее Т/С1 (рис. 4.2).
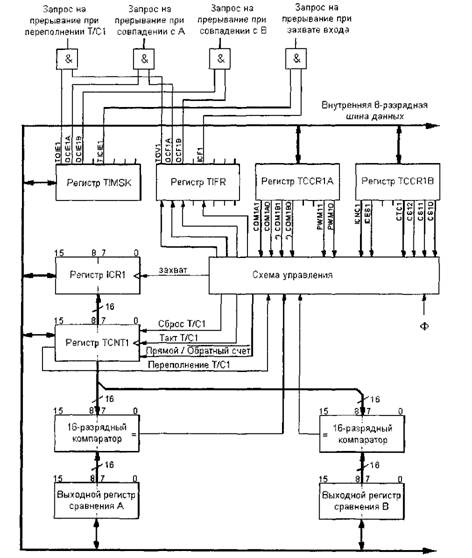
Рис. 4.2. Схема таймера/счетчика T/C1
В дополнение к счетному регистру и регистру управления, он содержит регистр захвата по входу (ICR1) и два 16-ти разрядных регистра сравнения на выходе (в некоторых моделях микроконтроллеров регистр сравнения В отсутствует).
Рассмотрим назначение отдельных регистров:
-TCNT1 – счетный регистр (содержимое счетчика);
-TCCR1А – регистр управления для определения реакции выводов
-ОС1А/ОС1В в случае совпадения состояния счетчика в регистре TCNT1 с регистрами сравнения OCR1A/OCR1B, а также для выбора режима широтно-импульсной модуляции;
-TCCR1B – регистр управления для настройки делителя частоты, для разрешения подачи сигнала сброса для регистра TCNT1 и для управления захватом;
-ICR1 – регистр захвата по входу (при появлении на выводе ICP фронта входного сигнала, определенного как активный, текущее состояние счетчика будет перенесено в этот регистр);
-OCR1A, OCR1B – регистры сравнения; их содержимое постоянно сравнивается с состоянием счетчика. В случае совпадения выполняются действия, определенные регистром TCCR1A.
Регистр управления TCCR1A (рис. 4.3) находится в области ввода/вывода по адресу 0x2F (адрес 0x4F в SRAM).
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| COM1A1 | COM1A0 | COM1B1 | COM1B0 | – | – | PWM11 | PWM10 |
Рис. 4.3. Регистр TCCR1A таймера/счетчика T/C1
Разряды СОМ1А1/СОМ1А0 и СОМ1В1/СОМ1В0 определяют состояние вывода ОС1 А/ОС 1В при совпадении содержимого регистра сравнения А/В с содержимым счетчика. Возможные настройки для режима сравнения показаны в табл. 4.2.
Таблица 4.2. Возможные варианты для работы в режиме сравнения
| СОМ1х1 | СОМ1Х0 | Действия в случае совпадения |
| 0 | 0 | Выходное значение отсутствует |
| 0 | 1 | При совпадении ОС1х переключается в другое состояние |
| 1 | 0 | При совпадении на выходе ОС1х устанавливает лог. 0 |
| 1 | 1 | При совпадении на выходе ОС1х устанавливает лог. 1 |
В случае активизации режима ШИМ, разряды 4…7 в регистре TCCR1А имеют значения, отличные от указанных в табл. 1.6. Когда регистр управления TCCR1A определяет работу в конфигурации широтно-импульсного модулятора, то Т/С1 работает как суммирующий и вычитающий счетчик, осуществляя циклические переходы от 0x0000 к максимальному значению ТОР, и затем снова возвращаясь к 0x0000. При запрограммированной разрешающей способности ШИМ в N разрядов значение ТОР рассчитывается как:
![]()
Частота fШИМ, с которой повторяются циклы ШИМ, вычисляется по формуле:
![]()
причем частота таймера/счетчика fT/ci выбирается с помощью разрядов CSIO–CS 12 регистра TCCR1B, а разрешающая способность N – с помощью разрядов PWM10 и PWM11 регистра TCCR1A. Соответствующие взаимосвязи показаны в табл. 4.3.
Таблица 4.3. Выбор режима ШИМ (PWM11 и PWM10)
| PWM11 | PWWI10 | Разрешающая способность | Значение ТОР | Частота ШИМ |
| 0 | 0 | Режим ШИМ не активен | ||
| 0 | 1 | 8 разрядов | 0x00FF (255) |
fT/С1 /510 |
| 1 | 0 | 9 разрядов | 0x01FF (511) |
fT/С1 /1022 |
| 1 | 1 | 10 разрядов | 0x03FF(1023) |
fT/С1 /2046 |
Когда состояние счетчика в регистре TCNT1 совпадает со значением 10 младших разрядов регистра OCR1A/OCR1B, то, в зависимости от состояния разрядов СОМ1А1/СОМ1А0 или СОМ1В1/СОМ1В0 регистра TCCR1A, вывод ОС1А/ОС1В последующим тактовым импульсом устанавливается или сбрасывается. Соответствующие взаимосвязи показаны в табл. 4.4.
Таблица 4.4. Возможности выбора для режима сравнения
| СОМ1х1 | СОМ1х0 | Действие в случае совпадения |
| 0 | 0 | На выводе ОС1х нет никакого сигнала |
| 0 | 1 | На выводе ОС1х нет никакого сигнала |
| 1 | 0 | Неинвертирующий широтно-импульсный модулятор. В случае соответствия, при суммирующем подсчете на выводе ОС1х устанавливается лог. 0, а при подсчете с вычитанием – лог. 1 |
| 1 | 1 | Инвертирующий широтно-импульсный модулятор. В случае соответствия, при суммирующем подсчете на выводе ОС1х устанавливается лог. 1, а при подсчете с вычитанием –лог. 0 |
В случае неинвертирующего широтно-импульсного модулятора, коэффициент заполнения g прямоугольного сигнала на выводе с ШИМ соответствует значению n / (2N - 1), где n – значение в соответствующем регистре OCR, a N – разрешающая способность ШИМ в разрядах (рис. 4.4).
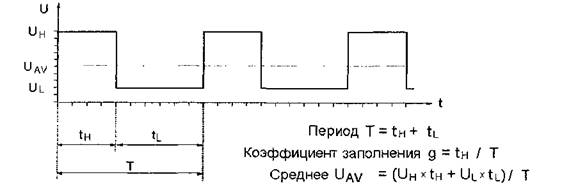
Рис. 4.4. Определение периода Т, коэффициента заполнения g и среднего арифметического UAV прямоугольных импульсов напряжения U
Если регистр сравнения OCR1A/OCR1B содержит значение ТОР или 0, то на соответствующем выводе, в соответствии с правилами, представленными в табл. 4.5, постоянно поддерживаются уровень лог. 0 или лог. 1.
На рис. 4.5. на примере фиктивной трехразрядной ШИМ показано формирование неинвертированного и инвертированного выходного ШИМ – сигнала на выходе ОС1В. На диаграмме А показан примерный вид ступенчатого сигнала, соответствующий состоянию счетчика TCNT1, на диаграмме В неинвертированный, а на диаграмме С – инвертированный выходной сигнал. Продолжительность периода TPWM в этом случае вычисляется в соответствии с рассмотренным выше уравнением TPWM = TT/C1 * (2N+1 - 2). Таким образом, при N=3 период ШИМ-сигнала состоит из 14 периодов тактового сигнала fT/C1 на входе TCNT1.
Таблица 4.5. Вывод ШИМ для особых случаев
| СОМ1х1 | СОМ1хО | OCR1X | Вывод ОС1х |
| 1 | 0 | 0 | 0 |
| 1 | 0 | ТОР | 1 |
| 1 | 1 | 0 | 1 |
| 1 | 1 | ТОР | 0 |
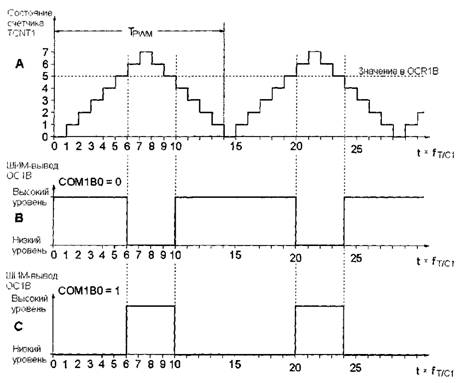
Рис. 4.5. Способ формирования неинвертированных и инвертированных выходных ШИМ-сигналов
В данном примере регистр сравнения OCR1B содержит значение 5. В регистре TCNT1, учитывая тот факт, что его исходное значение равно 0, значение 5 появляется после пяти тактовых импульсов. На следующем тактовом импульсе, после распознания совпадения на выводе ОС 1В устанавливается уровень лог. 0 (рис. 1.12, В).
Регистр TCNT1 инкрементируется далее до тех пор, пока не будет достигнуто значение ТОР, которое при трехразрядной ШИМ составляет 7. Как только достигнуто значение ТОР, направление счета меняется на обратное, и регистр выполняет вычитание. После девятого тактового импульса, начиная от стартового значения 0, содержимое регистра TCNT1 опять совпадает с содержимым регистра OCR1B. На следующем тактовом импульсе на выходе ОС1В устанавливается уровень лог. 1.
Регистр TCNT1 декрементируется далее до тех пор, пока опять не будет достигнуто значение 0. Это происходит после в общей сложности четырнадцати тактовых импульсов, считая от начального значения 0. Таким образом завершается период ШИМ-сигнала, направление счета вновь меняется на обратное и регистр TCNT1 опять выполняет сложение. Как видно на рис. 1.12 (В), "высокая" составляющая выходного сигнала составляет 6 тактовых периодов, а "низкая" – 4. Таким образом, коэффициент заполнения g = 6/10 или g = 3/5. Аналогично, диаграмма С на рис. 1.12 показывает соотношения для инвертированного выходного ШИМ-сигнала.
В режиме ШИМ устанавливается флаг переполнения TOV1, если счетчик при достижении состояния 0 меняет направление счета на обратное. Это прерывание по Т/С1 при переполнении, как и при нормальной работе в режиме счетчика, вызывается в том случае, если установлен флаг общего разрешения прерываний I в регистре состояния SREG, а также флаг TOIE1 в регистре TIMSK. В соответствии с этим, прерывания при совпадении регистров TCNT1 и OCR1A/OCR1B вызываются тогда, когда в регистре TIMSK установлен флаг общего разрешения прерываний и флаг OCIE1A/OCIE1B.
В отношении таймера/счетчика Т/С1 осталось рассмотреть еще регистр управления TCCR1B (адресу 0х2Е в области ввода/вывода, адрес 0х4Е в SRAM). Структура регистра TCCR1B показана на рис. 4.6.
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| ICNC1 | ICES1 | – | – | CTC1 | CS12 | CS11 | CS10 |
Рис. 4.6. Регистр TCCR1В таймера/счетчика Т/С1
Разряды 0 – 2 используются для выбора частоты тактирования Т/С1 (табл. 1.5). Если разряд СТС1 установлен в лог. 1, то Т/С1 возвращается в состояние 0x0000 по импульсу такта системной синхронизации, следующего после совпадения содержимого счетчика и регистра сравнения А. При работе в режиме ШИМ этот разряд на процесс работы никак не влияет.
Разряд ICES1 определяет, каким образом должна осуществляться передача состояния счетчика в регистр захвата ICR1: по нарастающему (ICES 1 = 1) или по ниспадающему фронту (ICES 1=0).
Разряд ICNC1 определяет, должно ли быть активизировано подавление помех (если ICNC1 = 0, то подавление помех отключено), Для подавления кратковременных импульсов помех, которые могут привести к ошибочному запуску, входной сигнал зондируется на протяжении четырех периодов такта системной синхронизации. Только после того как будут распознаны четыре последовательных низких или высоких уровня входного сигнала, что определяется разрядом ICES1, при активном подавлении помех будет выполнена запись текущего состояния счетчика в регистр ICR1.
Т/С2
Таймер/счетчик Т/С2 обычно имеет разрядность 8 бит и реализует функции сравнения на выходе и ШИМ, аналогичные Т/С1. Основная особенность Т/С2 заключается в том, что в качестве источника тактовых импульсов он может использовать генератор, независимый от системного. Для управления Т/С2 используются два регистра: ASSR (рис. 4.7) и TCCR2 (рис. 4.8).
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| – | – | – | – | AS2 | TCN2UB | OCR2UB | TCR2UB |
Рис. 4.7. Регистр ASSR таймера/счетчика Т/С2
Если установить в лог. 1 разряд AS2, то в качестве источника тактовых импульсов можно использовать внешний осциллятор. Оставшиеся три разряда (0-2) используются в программах для проверки того, что данные не записываются в регистры Т/С2 в тот момент, когда они обновляются аппаратно. Такая проверка необходима по той причине, что осциллятор Т/С2 работает асинхронно по отношению к системному осциллятору.
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| – | PWM2 | COM21 | COM20 | CTC2 | CS22 | CS21 | CS20 |
Рис. 4.8. Регистр TCCR2 таймера/счетчика Т/С2
Установка в лог. 1 разряда PWM2 переводит Т/С2 в режим ШИМ. Назначение разрядов COM21 и СОМ20 идентично назначению разрядов COM lxl и СОМ 1x0 таймера/счетчика Т/С1 – выбор режима сравнения на выходе.
Разряд СТС2 определяет, должен ли счетчик сбрасываться в нуль при совпадении его содержимого с регистром сравнения. Разряды 0 – 2 определяют частоту тактового сигнала, полученного с помощью предварительного делителя частоты такта системной синхронизации.
Таймеры/счетчики микроконтроллеров PIC
Описанное выше применение таймеров/счетчиков микроконтроллеров AVR справедливо также и для таймеров микроконтроллеров PIC. Здесь используются аналогичные принципы измерения ширины и частоты импульсов, а также широтно-импульсной модуляции, режимов сравнения и захвата.
В микроконтроллерах PIC могут использоваться три таймера: TMR0, TMR1 и TMR2.
TMR0
TMR0 (рис. 4.9) – это 8-разрядный таймер/счетчик. Таким образом, счет для него ограничен диапазоном 0-255. Его тактирование реализуется от внешнего источника или на основании такта системной синхронизации.
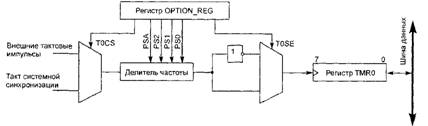
Рис. 4.9. Схема таймера/счетчика TMR0
Для управления работой таймера TMR0 используются следующие разряды регистра OPTION_REG:
-разряд 5 – T0CS определяет выбор источника синхроимпульсов (0 – внутренний; 1 – внешний на входе TOCKI);
-разряд 4 – T0SE определяет выбор фронта, по которому происходит увеличение содержимого счетного регистра TMR0 (0 – по нарастающему; 1 – по ниспадающему фронту тактового сигнала);
-разряд 3 – PSA использование предварительного делителя частоты (0 – делитель используется для управления таймером TMR0; 1 – для управления сторожевым таймером);
-разряды 0-2 – PS0, PS1, PS2 – выбор коэффициента деления частоты входного тактового сигнала (табл. 4.6).
Таблица 4.6. Назначение разрядов PSO - PS2 регистра OPTIONJREG
| PS2 | PS1 | PSO | Коэффициент деления частоты входного тактового сигнала |
| 0 | 0 | 0 | 2 |
| 0 | 0 | 1 | 4 |
| 0 | 1 | 0 | 8 |
| 0 | 1 | 1 | 16 |
| 1 | 0 | 0 | 32 |
| 1 | 0 | 1 | 64 |
| 1 | 1 | 0 | 128 |
| 1 | 1 | 1 | 256 |
Для управления прерываниями от таймера TMR0 используются следующие разряды регистра INTCON:
-разряд 2 – TOIF флаг прерывания при переполнении TMR0;
-разряд 5 – TOIE флаг разрешения прерывания при переполнении TMR0;
-разряд 7 – GIE – флаг общего разрешения прерываний.
TMR1
TMR1 (рис. 4.11) – это 16-разрядный таймер/счетчик, который может использоваться для формирования запросов на прерывание, подобно TMR0, или же работать в режимах захвата, сравнения и ШИМ.
Тактирование таймера TMR1 осуществляется от сигнала системной синхронизации или от специального генератора, предназначенного для работы с относительно медленными программными приложениями. Как правило, используется кварцевый резонатор частотой 32,768 кГц.
Для управления таймером TMR1 используется регистр T1CON (рис. 4.12). Назначение отдельных разрядов регистра T1CON:
-TMRION – подключение таймера (0 – отключен, 1 – включен);
-TMR1CS – выбор источника тактирующих сигналов (0 – такт системной синхронизации; 1 – генератор 32,768 кГц);
-Tl SYNC включение/отключение синхронизация специального генератора с генератором импульсов системной синхронизации (0 – включена; 1 – отключена);
-T10SCEN разрешение/запрет тактирования таймера TMR1 от специального генератора (0 генератор отключен; 1 – тактирование разрешено);
T1CKPS0, T1CKPS1 – выбор коэффициента деления частоты (табл. 4.7).
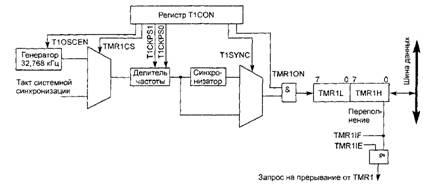
Рис. 4.11. Схема таймера/счетчика TMR1
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| – | – | T1CKPS1 | T1CKPS0 | T10SCEN | T1SYNC | TMR1CS | TMR1ON |
Рис. 4.12. Регистр T1CON микроконтроллеров PIC
Таблица 4.7. Назначение разрядов T1CKPS0 - T1CKPS1 регистра T1CON
| T1CKPS1 | T1CKPS0 | Коэффициент деления частоты тактового сигнала |
| 0 | 0 | 1 |
| 0 | 1 | 2 |
| 1 | 0 | 4 |
| 1 | 1 | 8 |
Счетный регистр таймера TMR1 представляет собой регистровую пару TMR1H, TMR1L, а управление прерываниями осуществляется с помощью разрядов регистров PIR1 и РIЕ1:
Регистр PIR1:
-разряд 0 – TMR1IF флаг переполнения TMR1;
-разряд 2 – ССР 1 IF флаг прерывания при возникновении захвата по входу/
Регистр PIE1:
-разряд 0 – TMR1IE флаг разрешения прерывания при переполнении TMR1;
-разряд 2 – ССР НЕ флаг разрешения прерывания при возникновении захвата по" входу.
TMR2
Назначение таймера TMR2 (рис. 4.13) измерение временных интервалов для реализации ШИМ, обеспечения определенной скорости обмена по последовательному порту и т.п. В этом смысле он подобен таймеру TMR0.
Таймер TMR2 тактируется импульсами, следующими с частотой такта системной синхронизации, деленной на четыре. Каждый раз, когда содержимое счетного регистра TMR2 совпадает с содержимым регистра PR2, таймер автоматически сбрасывается в исходное (нулевое) состояние.
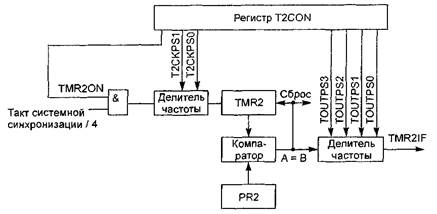
Рис. 4.13. Схема таймера/счетчика TMR2
При каждом совпадении TMR2 и PR2 генерируется запрос на прерывание, частоту возникновения которого можно также масштабировать с помощью выходного делителя частоты.
Для управления таймером TMR2 используется регистр T2CON (рис. 4.14).
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| – | TOUTPS3 | TOUTPS2 | TOUTPS1 | TOUTPS0 | TMR2ON | T2CKPS1 | T2CKPS0 |
Рис. 4.14. Регистр T2CON микроконтроллеров PIC
Назначение отдельных разрядов регистра T2CON:
-T2CKPS0-T2CKPS1 управление предварительным делителем частоты (табл. 4.8);
-TMR20N – подключение таймера (0 – отключен, 1 – включен);
-TOUTPS0-TOUTPS3 – выбор коэффициента деления частоты запросов на прерывание при TMR2::=:PR2 (табл. 4.9).
Таблица 4.8. Назначение разрядов T2CKPS0 - T2CKPS1 регистра T2CON
| T1CKPS1 | T1CKPS0 | Коэффициент деления частоты тактового сигнала |
| 0 | 0 | 1 |
| 0 | 1 | 4 |
| 1 | X | 16 |
Таблица 4.9. Назначение разрядов TOUTPS0 - TOUTPS3 регистра T2CON
| TOUTPS3 | TOUTPS2 | TOUTPS1 | TOUTPS0 | Коэффициент деления частоты запросов |
| 0 | 0 | 0 | 0 | 1 |
| 0 | 0 | 0 | 1 | 2 |
| 0 | 0 | 1 | 0 | 3 |
| 0 | 0 | 1 | 1 | 4 |
| 0 | 1 | 0 | 0 | 5 |
| о | 1 | 0 | 1 | 6 |
| 0 | 1 | 1 | 0 | 7 |
| 0 | 1 | 1 | 1 | 8 |
| 0 | 0 | 0 | 9 | |
| 0 | 0 | 1 | 10 | |
| 0 | 1 | 0 | 11 | |
| 0 | 1 | 1 | 12 | |
| 1 | 0 | 0 | 13 | |
| 1 | 0 | 1 | 14 | |
| 1 | 1 | 0 | 15 | |
| 1 | 1 | 1 | 16 |
Для организации прерываний используются разряды TMR2JE (флаг разрешения) и TMR2IF (флаг прерывания) регистров PIE1 и PIR1 соответственно.
Для того чтобы эффективно использовать таймер TMR2, используются следующие формулы:
где Т – требуемая временная задержка, К1 коэффициент деления предварительного делителя частоты; К2 – коэффициент деления делителя частоты запросов на прерывание; PR2 – содержимое регистра PR2; F – частота системной синхронизации.
Модуль ССР
Таймеры TMR1 и TMR2 микроконтроллеров PIC применяются в составе модуля сравнения/захвата/ШИМ – ССР (Compare-Capture-PWM). Таких модулей может быть два: ССР1 и ССР2, – управление которыми реализовано с помощью регистров CCPxCON (рис. 4.15),
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| – | – | DC1BX1 | DC1BX0 | CCP1M3 | CCP1M2 | CCP1M1 | CCP1M0 |
Рис. 4.15. Регистр CCPxCON микроконтроллеров PIC
Назначение отдельных разрядов регистра CCPxCON:
ССР1М0 – ССР1МЗ – выбор режима захвата/сравнения (табл. 4.9) DC1ВХ0 – DC1ВХ1 – два младших разряда 10-разрядной ШИМ.
Таблица 4.9. Назначение разрядов ССР1М1 -ССР1МЗ регистра CCPxCON
| ССР1МЗ | ССР1М2 | ССР1М1 | ССР1М0 | Значение |
| 0 | 0 | X | X | Модуль ССР отключен |
| 0 | 1 | 0 | 0 | Захват по каждому ниспадающему фронту |
| 0 | 1 | 0 | 1 | Захват по каждому нарастающему фронту |
| 0 | 1 | 1 | 0 | Захват по каждому 4-му нарастающему фронту |
| 0 | 1 | 1 | 1 | Захват по каждому 16-му нарастающему фронту |
| 1 | 0 | 0 | 0 | В случае совпадения на выходе высокий уровень |
| 1 | 0 | 0 | 1 | В случае совпадения на выходе низкий уровень |
| 1 | 0 | 1 | 0 | В случае совпадения – запрос на прерывание |
| 1 | 0 | 1 | 1 | Особый случай режима сравнения |
| 1 | 1 | X | X | Режим ШИМ |
В режиме захвата (то есть, фиксации значения таймера в момент появления определенного условия) используются регистры CCPR1H, CCPR1L (в случае TMR1) или CCPR2H, CCPRL (в случае TMR2). В таком режиме таймер выполняет функции счетчика тактовых импульсов, и при наступлении условия захвата его содержимое переписывается в регистровую пару CCPRx.
В режиме сравнения модуль ССР формирует сигнал на выходе ССРх в том случае, когда содержимое счетного регистра становится равным значению, записанному в регистровой паре CCPRxL, CCPRxH. Этот режим обычно используется для выдачи сигналов на внешние устройства по истечении некоторого временного интервала.
В режиме ШИМ таймер работает как делитель частоты, формирующий период ШИМ-сигнала. Его значение постоянно сравнивается с содержимым регистра PR2, и при совпадении компаратор сбрасывает таймер в исходное состояние, после чего цикл повторяется. Параллельно организован контур сравнения, включающий в себя таймер, второй компаратор и регистр CCPRxH. Выходы обоих компараторов управляют RS-триггером, выход которого соединен с выводом ССРх.
Вначале триггер устанавливается в "1" по сигналу сброса таймера, а по сигналу компаратора контура сравнения – сбрасывается в "О". Таким образом, на выходе RS-триггера формируется сигнал с периодом, определяемым содержимым регистров PR2 и CCPRxH.
Сторожевой таймер
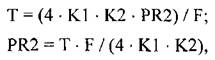
Сторожевой таймер (watchdog timer) встроенный таймер, тактируемый внутренним RC-осциллятором, который автоматически сбрасывает микроконтроллер при переполнении своего счетного регистра. В частности, он используется для предотвращения перехода микроконтроллера в режим бесконечного цикла, когда на него невозможно повлиять извне. Обобщенная структурная схема сторожевого таймера показана на рис. 5.1.
В микроконтроллерах AVR и PIC управление сторожевым таймером несколько отличается. Так, в микроконтроллерах AVR для этого используется регистр управления WDTCR (адрес в области ввода/вывода 0x21, адрес SRAM – 0x41) (рис. 5.2).
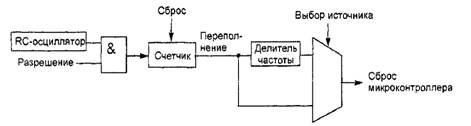
Рис. 5.1. Структурная схема сторожевого таймера
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| – | – | – | WDTOE | WDE | WDP2 | WDP1 | WDP0 |
Рис. 5.2. Регистр WDTCR микроконтроллеров AVR
Назначение отдельных разрядов регистра WDTCR:
-WDP0-WDP2 – выбор коэффициента деления частоты следования сигналов сброса (при этом период до наступления сброса зависит от рабочего напряжения процессора – табл. 5.1);
-WDE включение/отключение сторожевого таймера (1 – включен);
-WDTOE – если сторожевой таймер должен быть отключен, следует установить этот разряд в лог. 1. После установки этого разряда он в течение четырех периодов такта системной синхронизации остается в состоянии лог. 1, а затем аппаратно сбрасывается в лог. 0. Программа пользователя имеет возможность отключить сторожевой таймер посредством записи лог. 0 в разряд WDE только во время этих четырех тактов системной синхронизации.
Таблица 5.1 Назначение разрядов WDP0 - WDP2 регистра WDTCR
| WDP2 | WDP1 | WDPP | Коэффициент деления | Период до сброса (при Vcc в 5 В) | Период до сброса (при Vcc = 3 В) |
| 0 | 0 | 0 | 1 | 16 мс | 47 мс |
| 0 | 0 | 1 | 2 | 32 мс | 94 мс |
| 0 | 1 | 0 | 4 | 64 мс | 190 мс |
| 0 | 1 | 1 | 8 | 128 мс | 380 мс |
| 1 | 0 | 0 | 16 | 256 мс | 750 мс |
| 1 | 0 | 1 | 32 | 512 мс | 1,5с |
| 1 | 1 | 0 | 64 | 1 с | Зс |
| 1 | 1 | 1 | 128 | 2,1 с | 6с |
В системе команд AVR сторожевой таймер сбрасывается в исходное состояние по команде wdr. В микроконтроллерах PIC для управления сторожевым таймером предназначен рассмотренный выше регистр OPTION. Для этого разряд PSA должен быть установлен в лог. 1, чтобы предварительный делитель частоты был переключен на использование совместно со сторожевым таймером, а не с TMR0. Коэффициент деления выбирается с помощью разрядов PS2-PS0 (табл. 5.2). В отличие от микроконтроллеров AVR, в микроконтроллерах PIC отсутствует возможность включать/отключать сторожевой таймер с помощью регистра управления. Единственный способ предотвратить сброс от сторожевого таймера периодически выполнять ассемблерную команду clrwdt.
Таблица 5.2. Выбор коэффициента деления частоты следования сигналов сброса от сторожевого таймера в микроконтроллерах PIC
| PS2 | PS1 | PS0 | Коэффициент деления | Период до сброса |
| 0 | 0 | 0 | 1 | 18 мс |
| 0 | 0 | 1 | 2 | 36 мс |
| 0 | 1 | 0 | 4 | 72 мс |
| 0 | 1 | 1 | 8 | 144 мс |
| 1 | 0 | 0 | 16 | 288 мс |
| 1 | 0 | 1 | 32 | 576 мс |
| 1 | 1 | 0 | 64 | 1,2 с |
| 1 | 1 | 1 | 128 | 2,3 с |
Параллельные порты – это особые устройства ввода/вывода, позволяющие передавать во внешний мир или принимать одновременно восемь разрядов данных. Для обозначения портов используются латинские буквы А, В, С и т.д. Количество портов ввода/вывода варьируется в зависимости от модели микроконтроллера.
В микроконтроллерах AVR каждому параллельному порту ввода/вывода поставлены в соответствие три регистра (букве х соответствует имя порта А, В и т.д.):
-DDRx – регистр направления передачи данных – определяет, является тот или иной вывод порта входом или выходом; если некоторый разряд регистра DDRx содержит лог. 0, то соответствующий вывод порта сконфигурирован как вход, в противном случае – как выход;
-PORTx – регистр порта если вывод выполняет роль выхода, то в соответствующий разряд записывается значение, предназначенное для вывода; если вывод выполняет роль входа, то лог. 0 в некотором разряде регистра PORTx соответствует высокоомный вход, а лог. 1 вход, нагруженный подтягивающим сопротивлением;
-PINx – регистр выводов порта – в отличие от регистров DDRx и PORTx доступен только для чтения и позволяет считать входные данные порта на внутреннюю шину микроконтроллера.
Выводы портов зачастую выполняют различные альтернативные функции при работе с внутренними и периферийными модулями микроконтроллеров AVR. Так, к примеру, в некоторых моделях в качестве внешних тактовых входов таймеров/счетчиков Т/С0 и Т/С1 используются разряды 0 и 1 порта В или 4 и 5 порта D. Точное назначение выводов портов следует сверять по спецификации микроконтроллера.
В микроконтроллерах PIC каждому параллельному порту ввода/вывода поставлены в соответствие два регистра:
-PORTx – регистр данных порта;
-TRISx – регистр направления передачи данных через выводы порта (лог. 1 в некотором разряде этого регистра соответствует режим ввода, а лог. 0 – режим вывода).
В микроконтроллерах PIC серии 18Сх порт D может работать в режиме управляемого параллельного порта PSP (Parallel Slave Port). Это означает, что он действует как регистр, который может быть подключен к шине другого микроконтроллера, обмениваясь с ним данными. В режиме PSP, как и в случае обмена данными с любым периферийным устройством, используются сигналы RD (чтение), WR (запись) и CS (выбор кристалла) – разряды 0-2 порта Е (пример рис. 6.1).
Рис. 6.1. Пример подключения внешнего микроконтроллера PIC в режиме PSP
Для управления режимом PSP используется регистр TRISE (рис. 6.2).
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| IBF | OBF | IBOV | PSPMODE | – | TRISE2 | TRISE1 | TRISE0 |
Рис. 6.2. Регистр TRISE микроконтроллеров PIC
Режим PSP активизируется путем установки в лог. 1 разряда PSPMODE. Прерывания разрешаются установкой в лог. 1 разряда PSPIE (разряд 7) регистра PIE1, а запросы формируются в разряде PSPIF (разряд 7) регистра PIR1. С помощью разрядов 0-2 регистра TRISE осуществляется выбор режима для соответствующих разрядов порта Е.
Когда на линиях CS и RD (выводы RE2 и RE0) одновременно появляется низкий уровень сигнала, содержимое регистра OUTREG выводится через порт D. При записи в регистр OUTREG устанавливается в лог, 1 разряд OBF регистра TRISE – это означает, что выходной буфер заполнен данными. После передачи данных разряд OBF автоматически сбрасывается в лог. 0.
Когда на линиях CS и WR (выводы RE2 и RE1) одновременно появляется низкий уровень сигнала, осуществляется прием данных через порт D. Принятая величина сохраняется в регистре INREG, при этом автоматически устанавливается в лог. 1 разряд IBF регистра TRISE. После программного считывания содержимого регистра INREG этот разряд автоматически сбрасывается в лог. 0.
Если ранее принятый байт не считывается до поступления следующего байта в регистр INREG, устанавливается в лог. 1 разряд IBOV регистра TRISE, указывающий на переполнение входного буфера.
Последовательный ввод/вывод
В отличие от параллельного обмена данными, в случае последовательного ввода/вывода используется только одна информационная линия. При этом передача данных бывает асинхронной и синхронной.
При синхронном последовательном вводе/выводе синхронизируется передача отдельных битов данных с помощью одновременно передаваемого тактового сигнала. Синхронная последовательная передача данных применяется, на уровне печатных плат, в том числе – для обмена данными между различными интегрированными блоками в составе схемы микроконтроллера и различными периферийными схемами (например, для обработки видеосигнала).
В противоположность этому, при асинхронной передаче данных передается не тактовый сигнал, а старт-бит и стоп-бит, определяющие начало и завершение передачи слова данных (рис. 7.1).

Рис. 7.1. Типичный формат асинхронной передачи данных (в данном примере – байта 10000010)
Главной областью применения асинхронной передачи данных, является не обмен данными в составе схемы, а коммуникация между блоками, разделенными пространственно и обладающими признаками собственного интеллекта. В качестве примера можно назвать связь между персональным компьютером и принтером, модемом, программирующим устройством или регистратором данных.
В микроконтроллерах AVR асинхронная передача данных осуществляется с помощью приемопередатчика UART, а в микроконтроллерах PIC – приемопередатчика USART или по шине CAN. Для синхронного ввода/вывода используется особый режим приемопередатчика USART, а также интерфейсы SPI и I2С (в микроконтроллерах PIC – с помощью порта MSSP).
Приемопередатчик UART микроконтроллеров AVR
Для работы UART выделены в общей сложности четыре регистра:
-регистр управления UCR (адрес в области ввода/вывода – 0х0А, адрес SRAM – 0х2А) – предназначен для управления функциями приемопередатчика и для разрешения/запрета прерываний от UART (рис. 7.2);
-регистр состояния USR (адрес в области ввода/вывода – 0x0В, адрес SRAM –0x2В) (рис. 7.3);
-регистр данных UDR (адрес в области ввода/вывода – 0х0С, адрес SRAM – 0x2С) – физически состоит из двух регистров, обращение к которым осуществляется по одному и тому же адресу; один из них используется для передачи, а другой – для приема данных;
-регистр UBRR (адрес в области ввода/вывода – 0x09, адрес SRAM – 0x29) – применяется для настройки требуемой скорости передачи данных с помощью встроенного контроллера, позволяющего устанавливать наиболее распространенные скорости передачи по стандарту RS232C.
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| RXCIE | TXCIE | UDRIE | RXEN | TXEN | CHR9 | RXB8 | TXB8 |
Рис. 7.2. Регистр управления UCR микроконтроллеров AVR
Если разряд RXCIE и разряд общего разрешения прерываний I в регистре состояния SREG установлены в лог. 1, то разрешается прерывание по завершению приема через UART.
Если разряд TXCIE и разряд общего разрешения прерываний I в регистре состояния SREG установлены в лог. 1, то разрешается прерывание по завершению передачи через UART.
Если разряд UDRIE и разряд общего разрешения прерываний I в регистре состояния SREG установлены в лог. 1, то разрешается прерывание по опустошению регистра данных UART.
Если разряд RXEN установлен в лог. 1, то происходит разблокирование приемника, и вывод 0 порта D становится входом UART. Если разряд RXEN содержит лог. 0, то принимающий элемент приемопередатчика UART блокируется, и вывод 0 порта D может использоваться в качестве обычного входа/выхода. Если разряд RXEN содержит лог. 0, то флаги OR и FE регистра состояния USR не могут быть установлены. Если эти флаги все же установлены, то они с помощью RXEN не сбрасываются.
Если разряд TXEN установлен в лог. 1, то происходит разблокирование передатчика, а вывод 1 порта D становится выходом UART. Если разряд TXEN содержит лог. 0, то передающий элемент UART блокируется, и вывод 1 порта D может использоваться в качестве обычного входа/выхода. Если разряд TXEN во время процесса передачи устанавливается в лог. 0, то передатчик не блокируется до тех пор, пока текущий символ в сдвиговом регистре, а также символ, возможно, ожидающий на передачу в регистре UDR не будут полностью переданы.
Если разряд CHR9 установлен в лог. 1, то слова данных, подлежащие передаче/считыванию имеют длину 11 бит (9 разрядов данных плюс стартовый и стоп-бит). Девятый бит из разряда ТХВ8 при передаче попадает в UCR, а при приеме – в разряд RXB8 регистра UCR. Девятый бит может быть использован для размещения дополнительных информационных данных, например, в качестве бита четности или второго стоп-бита. Если разряд CHR9 установлен в лог. 0, то слова данных, подлежащие передаче/считыванию имеют длину 10 бит (8 разрядов данных плюс стартовый и стоп-бит).
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| RXC | TXC | UDRE | FE | OR | – | – | – |
Рис. 7.3. Регистр состояния USR микроконтроллеров AVR
Регистр состояния USR информирует программу пользователя о состоянии приемопередатчика UART.
Флаг RXC устанавливается в лог. 1, если принятое слово данных было перенесено из сдвигового регистра в регистр UDR (без учета возможных ошибок кадрирования, которые могли возникнуть во время передачи данных). После чтения регистра UDR флаг RXC автоматически сбрасывается в лог. 0.
Флаг ТХС будет установлен в лог. 1, если символ в сдвиговом регистре был передан полностью (то есть, включая стоп-бит), и из регистра UDR не ожидается новый байт данных. Флаг очень полезен в полудуплексном режиме работы, когда непосредственно после передачи необходимо переключиться в режим приема. При входе в подпрограмму обработки прерывания флаг завершения передачи ТХС аппаратно сбрасывается в лог. 0.
Флаг UDRE устанавливается в лог. 1, если содержимое регистра UDR было перенесено в сдвиговой регистр. С его помощью пользователь получает уведомление о том, что приемопередатчик готов к передаче нового байта.
Соответствующая подпрограмма обработки прерывания выполняется до тех пор, пока установлен флаг UDRE. Флаг UDRE сбрасывается при записи байта данных в регистр UDR. В случае сброса при включении питания флаг UDRE устанавливается в лог. 1, чтобы показать, что приемопередатчик готов к передаче нового байта данных.
Флаг FE устанавливается в лог. 1 при обнаружении ошибки кадрирования. Это происходит, если при трех сканированиях стоп-бита был более одного раза обнаружен лог. 0, и тем самым стоп-бит был распознан как сигнал низкого уровня. Флаг FE сбрасывается, когда стоп-биту соответствует сигнал высокого уровня. Пользовательская программа должна постоянно проверять флаг FE перед чтением регистра UDR, чтобы можно было распознать потенциально некорректный символ в регистре приема.
Флаг OR устанавливается в лог. 1, если один из символов, переданных в регистр UDR из сдвигового регистра, не был прочитан перед следующим поступившим символом. Этот флаг обновляется после считывания действительного символа из регистра UDR, поэтому пользовательская программа должна всегда проверять флаг OR после чтения регистра UDR, чтобы распознать потерю одного поступившего символа. Флаг OR сбрасывается при переносе считанного символа в регистр UDR.
Настройка скорости передачи данных через UART
В приемопередатчик UART встроен специальный контроллер скорости передачи данных, представляющий собой делитель частоты для определения скорости передачи данных на основании такта системной синхронизации.
Скорость передачи может быть вычислена по следующему уравнению:
![]()
где fBaud скорость передачи в бодах, Ф – такт системной синхронизации; UBRR содержимое 8-разрядного регистра UBRR (0...255).
Значения, записываемые в регистр UBRR для наиболее распространенных скоростей передачи данных, представлены в табл. 7.1.
Таблица 7.1. Значения регистра UBRR для наиболее распространенных скоростей передачи данных и частоты работы кварцевого осциллятора
|
Скорость передачи данных, бод |
1,8432 МГц | Погрешность (%) | 3,6864 МГц | Погрешность (%) | 4 МГц |
Погреш ность (%) |
| 1200 | UBRR = 95 | 0,0 | UBRR = 191 | 0,0 | UBRR = 207 | 0,2 |
| 2400 | UBRR = 47 | 0,0 | UBRR = 95 | 0,0 | UBRR = 103 | 0,2 |
| 4800 | UBRR = 23 | 0,0 | UBRR = 47 | 0,0 | UBRR = 51 | 0,2 |
| 9600 | UBRR = 11 | 0,0 | UBRR = 23 | 0,0 | UBRR = 25 | 0,2 |
| 14400 | UBRR=7 | 0,0 | UBRR=15 | 0,0 | UBRR = 16 | 2,1 |
| 19200 | UBRR=5 | 0,0 | UBRR = 11 | 0,0 | UBRR=12 | 0,2 |
| 2400 | UBRR = 207 | 0,2 | UBRR = 287 | – | UBRR = 312 | – |
| 4800 | UBRR = 103 | 0,2 | UBRR = 143 | 0,0 | UBRR = 155 | 0,2 |
| 9600 | UBRR = 51 | 0,2 | UBRR = 71 | 0,0 | UBRR = 77 | 0,2 |
| 14400 | UBRR = 34 | 0,8 | UBRR = 47 | 0,0 | UBRR = 51 | 0,2 |
| 19200 | UBRR = 25 | 0,2 | UBRR = 35 | 0,0 | UBRR = 38 | 0,2 |
Значения, выделенные курсивом, превышают 255, и потому не могут быть установлены в регистре UBRR, имеющем длину всего 8 разрядов. Если потребуется соответствующая скорость передачи данных, то необходимо переходить на более низкие частоты колебаний кварцевого осциллятора.
Приемопередатчик USART микроконтроллеров PIC
В микроконтроллерах PIC скорость обмена данными через приемопередатчик USART задается восьмиразрядным счетчиком во взаимодействии с регистром SPBRG. Когда содержимое счетчика и регистра SPBRG совпадает, счетчик сбрасывается в нуль. На значение скорости передачи через USART также влияет состояние разряда BRGH регистра управления TXSTA (рис. 1.32). Этот разряд определяет, какая требуется скорость для передачи данных: высокая (BRGH = 1) или низкая (BRGH = 0).
Значение для записи в регистр SPBRG вычисляется по следующей формуле:
SPBRG = (FOSC * 4BRGH) / (64 * скорость передачи) - 1.
Например, для того чтобы получить скорость передачи 9600 бод при микроконтроллере с рабочей частотой FOSC = 10 МГц в регистр SPBRG должно быть записано значение (10 * 106 * 4)/(64 * 9600) – 1 = 64,1 (округляем до 64).
Управление приемопередатчиком USART осуществляется с помощью регистров TXSTA, который используется для управления процессом передачи (рис. 7.4), и RCSTA, который используется для управления процессом приема (рис. 7.5).
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| CSRC | TX9 | TXEN | SYNC | – | BRGH | TRMT | TX9D |
Рис. 7.4. Регистр TXSTA микроконтроллеров PIC
В отличие от приемопередатчика UART микроконтроллеров AVR, устройство USART может обмениваться данными не только в асинхронном, но и в синхронном режиме. В этом случае поразрядный сдвиг данных из сдвигового регистра в линию передачи (или наоборот) осуществляется по синхроимпульсам самого приемопередатчика USART или внешнего устройства. Выбор режима работы USART осуществляется с помощью разряда SYNC регистра TXSTA (1 – синхронный режим; 0 – асинхронный режим), а выбор источника тактовых импульсов в синхронном режиме – с помощью разряда CSRC (1 – внутренний источник; 0 – внешний источник).
Назначение остальных разрядов регистра TXSTA:
-TX9D – девятый бит передаваемых данных, если ТХ9 = 1;
-TRMT – флаг, сигнализирующий о завершении передачи байта;
-TXEN – флаг разрешения передачи данных;
-ТХ9 – разрешение (лог. 1) передачи данных в девятиразрядном формате.
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| SREN | RX9 | SREN | CREN | ADDEN | FERR | OERR | RX9D |
Рис. 7.5. Регистр RCSTA микроконтроллеров PIC
Назначение разрядов регистра RCSTA:
-RX9D – девятый бит принимаемых данных, если RX9 = 1;
-OERR – флаг, указывающий на переполнение буфера приема;
-FERR – флаг, указывающий на обнаружение ошибки в формате принимаемых данных;
-ADDEN – разрешение обнаружения адреса в асинхронном режиме передачи девяти бит данных– в некоторых микроконтроллерах PIC приемник USART может использоваться для приема сразу двух байтов в формате "данные:адрес", где адрес предназначен для идентификации устройства, связанного с шиной данных (в таком случае подпрограмма обработки прерывания вначале проверит адрес запрошенного устройства и только потом обработает байт данных);
-CREN – разрешение режима непрерывного приема;
-SREN – флаг разрешения однократного приема в синхронном режиме (после приема данных автоматически сбрасывается в лог. 0);
-RX9 – флаг разрешения приема девяти бит данных;
-SREN – флаг активизации USART (для передачи битов данных используется вывод 6 порта С, а для приема вывод 7 того же порта).
Флаги запросов (TXIF и RCIF) и разрешения (TXIE и RCIE) прерываний от USART находятся в регистрах PIR и PIE.
Синхронная передача данных по интерфейсу SPI
Интерфейс SPI (Serial Peripheral Interface) служит для обмена данными с периферийными устройствами. В качестве таких устройств могут выступать простые сдвиговые регистры или буквенно-цифровые модули индикации, а также сложные микропроцессорные системы или системы регистрации данных. Многие компании-изготовители предлагают большой выбор устройств с интерфейсом SPI.
В случае обмена данными по интерфейсу SPI микроконтроллер работает в режиме ведущего устройства (Master), взаимодействуя с одним или несколькими ведомыми блоками (Slave). Схема передачи данных по интерфейсу SPI микроконтроллеров AVR/PIC показана на рис. 7.6 (MSB старший разряд, a LSB – младший разряд передаваемого байта).
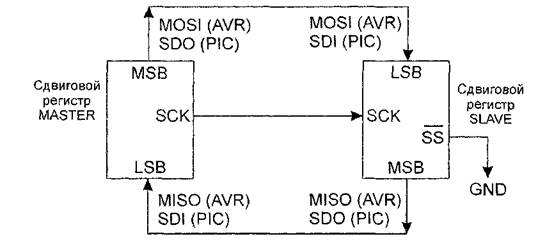
Рис. 7.6. Схема передачи данных по интерфейсу SPI микроконтроллеров AVR/PIC
Ведущее устройство берет на себя активную часть обмена данными, вызывая передачу и управляя процессом. Ведомое устройство не может само быть активным. Оно принимает и передает данные только тогда, когда происходит его активизация со стороны ведущего устройства по линии /SS. Ведущее устройство также генерирует такт для передачи по выходной линии SCK. Для ведомого блока вывод SCK является входом, через который он получает от Master-устройства тактирующие сигналы.
Если ведомое устройство активизируется ведущим по линии /SS, то начинается обмен данными: Master записывает подлежащий передаче байт в свой сдвиговой регистр данных (для микроконтроллеров AVR регистр SPDR, для микроконтроллеров PIC – регистр SSPBUF). С помощью каждого выработанного тактового импульса Master перемещает один бит данных на выход MOSI/SDO, a Slave одновременно в обратном направлении передает один бит на вход MISO/SDI ведущего блока. Таким образом, в течение цикла SPI, состоящего из восьми тактовых импульсов, Master и Slave обмениваются байтом данных.
По окончании передачи данных в регистре состояния интерфейса SPI устанавливается флаг соответствующего запроса на прерывание. Этот флаг указывает на окончание передачи и вызывает запрос на прерывание после того как в регистре управления SPI будет установлен разряд разрешения на прерывание от интерфейса SPI. В режиме "Master" текущая передача данных может быть преждевременно завершена выдачей в линию /SS сигнала лог. 1.
К интерфейсу SPI ведущего устройства можно подключать несколько ведомых устройств (пример для микроконтроллеров AVR на рис. 7.7), однако активным будет только то из них, на вход /SS которого будет подан уровень лог. 0. Выходы MISO незадействованных ведомых блоков находятся в высокоомном состоянии и не влияют на процесс передачи данных.
В примере на рис. 7.7 устройство G2, с точки зрения ведущего устройства, является только блоком передачи (например, ЦАП с интерфейсом SPI), а устройство G3 – только блоком приема.
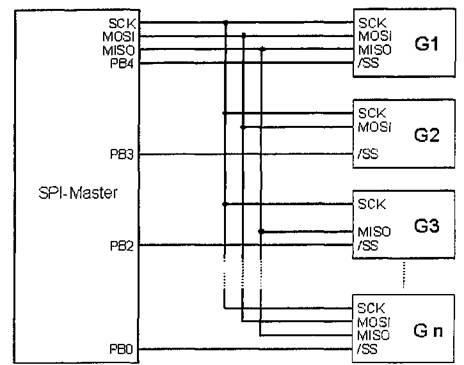
Рис. 7.7. Подключение нескольких ведомых устройств к одному ведущему по SPI (для AVR)
В микроконтроллерах AVR в качестве линий SPI используются выводы порта В (табл. 7.2). В микроконтроллерах PIC для последовательной синхронной передачи данных используется порт MSSP, работающий в режиме интерфейса SPI или I2С. Линиям SPI соответствуют выводы порта А и С (табл. 7.2).
Таблица 7.2. Распределение выводов портов для линий интерфейса SPI
| Линия | Микроконтроллеры AVR | Микроконтроллеры PIC |
| /SS | Разряд 4 порта В | Зависит от модели (например, разряд 5 порта А) |
| MOSI (SDO) | Разряд 5 порта В | Разряд 5 порта С |
| MISO(SDI) | Разряд 6 порта В | Разряд 4 порта С |
| SCK | Разряд 7 порта В | Разряд 3 порта С |
Регистры управления и состояния SPI в микроконтроллерах AVR
Регистр управления SPCR интерфейса SPI в микроконтроллерах AVR (рис. 7.8) находится в области ввода/вывода по адресу 0x0D (адресу 0x2D в SRAM).
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| SPIE | SPE | DORD | MSTR | CPOL | CPHA | SPR1 | SPR0 |
Рис. 7.8. Регистр управления SPCR микроконтроллеров AVR
По окончании передачи данных через интерфейс SPI аппаратная часть устанавливает в регистре состояния SPCR разряд SPIF (флаг прерываний от интерфейса SPI). Этот флаг указывает на завершение передачи, и приводит к запросу на прерывание как только в регистре управления SPCR будет установлен разряд SPIE, а в регистре состояния SREG – флаг общего разрешения прерываний I.
Разряд SPE активизирует интерфейс SPI (лог. 1) или отключает его (лог. 0). После поступления сигнала сброса этот разряд принимает значение лог. 0, и тем самым система SPI отключается.
Если разряд DORD содержит лог. 0, то сначала будет передан старший разряд байта данных. При DORD = 1 первым передается младший разряд.
Когда разряд MSTR содержит лог. 0, то система SPI определяется как ведомая (Slave), а при MSTR = 1 она будет определена как ведущая (Master). Когда линия /SS в режиме Master сконфигурирована как вход, то разряд MSTR при низком уровне сигнала на выводе /SS сбрасывается в лог. 0, и тем самым интерфейс SPI определяется как Slave. В этом случае в регистре состояния устанавливается флаг SPIF.
Когда разряд CPOL содержит лог. 0, то на выходе SCK в неактивном состоянии находится сигнал низкого уровня. Если CPOL = 1, то на SCK в неактивном состоянии находится сигнал высокого уровня. С помощью этого разряда, а также разряда СРНА (выбор фазы синхронизации) устанавливается один из четырех режимов передачи данных по интерфейсу SPI (табл. 7.3).
Разряды SPR1 и SPR0 при работе интерфейса SPI в режиме Master служат для выбора тактовой частоты для линии SCK. Если система SPI сконфигурирована как Slave, то эти разряды не имеют никакого значения. Взаимосвязь между разрядами SPR1, SPR0 и частотой импульсов в линии SCK показана в табл. 7.4.
Таблица 7.3. Режимы передачи данных по интерфейсу SPI в МК AVR
| CPOL | СРНА | Описание режима |
| 0 | 0 |
Master переводит линию /SS в состояние лог. 0. Для соответствующего ведомого блока передача начинается по ниспадающему фронту этого сигнала. Его выход MISO переходит из высокоомного в активное состояние, и старший разряд байта, находящегося в его регистре данных SPDR, появляется на выходе MISO. Собственно передачу данных Master начинает записью подлежащего передаче байта данных в свой регистр SPDR. Вслед за этим на выходе MOSI ведущего блока появляется старший разряд. На протяжении первой половины первого тактового импульса тактовая линия еще остается в состоянии покоя для того, чтобы обеспечить стабильную установку на соответствующем входе бита данных. По нарастающему фронту первого и каждого последующего тактового импульса принимаются биты, расположенные на входах Master и Slave, а по ниспадающему фронту следующий бит сдвигается дальше. После восьмого тактового импульса передача данных завершена, флаги SPIF в регистрах состояния ведущего и ведомого блоков установлены, а содержимое сдвиговых регистров будут перенесено в соответствующие приемные буферы. Выход MOSI ведущего блока возвращается в состояние покоя (лог. 1), а на выходе MISO ведомого блока, как правило, находится старший разряд байта, только что принятого ведущим блоком. Одновременно со сбросом линии /SS в исходное состояние (лог. 1) Master завершает передачу, Slave становится неактивным, а его выход MISO переходит в высокоомное состояние |
| 0 | 1 | Аналогично описанному выше случаю с той разницей, что состояние покоя тактовой линии здесь устанавливается при лог. 1, биты данных принимаются по первому и каждому последующему тактовому импульсу, а сдвиг осуществляется по нарастающему фронту сигнала |
| 1 | 0 |
Для того чтобы при этом режиме начать передачу данных, Master, как и в первом случае, переводит линию /SS в состояние лог. 0. Блок Slave разблокирован, и его выход MISO переходит из высокоомного в активное состояние. Логический уровень на MISO для этого случая не определен, но, как правило, на MISO находится младший разряд байта, переданного во время предыдущей передачи от Slave к Master. Собственно передачу данных Master в этом режиме начинает посредством записи байта данных, подлежащего передаче, в регистр SPDR. Для ведомого блока передача начинается по нарастающему фронту тактового сигнала. Старшие разряды подлежащих передаче байтов в ведущем и ведомом блоках с помощью нарастающего фронта первого тактового импульса устанавливаются на выходе MOSI ведущего блока (выходе MISO ведомого блока). По ниспадающему фронту первого и каждого последующего тактового импульса они переносятся на входы Master и Slave, а по нарастающему фронту следующий разряд сдвигается. После восьмого тактового импульса передача данных завершается, устанавливаются флаги SPIF в регистрах состояния интерфейсов Master и Slave, а содержимое их сдвиговых регистров переносится в соответствующие буферы приема. Выход MOSI ведущего блока возвращается в состояние покоя (лог. 1), на выходе MISO ведомого блока остается младший разряд байта, только что переданного ведущему блоку. Одновременно с возвратом в исходное состояние линии /SS (лог. 1) Master завершает передачу в целом, Slave становится неактивным, а его выход MISO переходит в высокоомное состояние. |
| 1 | 1 | Аналогично описанному выше случаю стой разницей, что состоянием покоя тактовой линии здесь является лог. 1, а биты данных сдвигаются по ниспадающему фронту первого и каждого последующего тактового импульса, а принимаются по нарастающему фронту |
Таблица 7.4. Частота импульсов в линии SCK в зависимости от разрядов SPR1, SPR0
| SPR1 | SPR0 | Частота импульсов в линии SCK |
| 0 | 0 | Частота системной синхронизации / 4 |
| 0 | 1 | Частота системной синхронизации /16 |
| 1 | 0 | Частота системной синхронизации / 64 |
| 1 | 1 | Частота системной синхронизации /128 |
Регистр состояния SPSR интерфейса SPI в микроконтроллерах AVR расположен в области ввода/вывода по адресу 0х0Е (0x2E в SRAM). В этом регистре используются только разряды 6 и 7:
-разряд 6 – флаг WCOL устанавливается в том случае, когда во время передачи данных через интерфейс SPI предпринимается попытка записи в регистр данных SPI, что приводит к разрушению только что переданного байта данных. По этой причине текущая передача данных доводится до завершения, а новый байт не записывается в сдвиговый регистр интерфейса SPI. Флаг WCOL должен быть сброшен пользователем вручную посредством считывания регистра состояния и последующего обращения к регистру данных интерфейса SPI;
-разряд 7 – флаг SPIF указывает на завершение передачи и вызывает запрос на прерывание, как только в регистре управления SPCR будет установлен разряд SPIE, а в регистре состояния SREG – разряд I. Когда линия /SS в режиме Master сконфигурирована как вход, то при низком уровне сигнала на выводе линии /SS также будет установлен флаг SPIF. Флаг SPIF сбрасывается автоматически аппаратной частью при выполнении подпрограммы обработки прерывания от интерфейса SPI. Альтернативно, сброс может быть выполнен вручную посредством считывания регистра состояния SPSR и последующего обращения к регистру данных интерфейса SPI.
Регистры управления и состояния SPI в микроконтроллерах PIC
Для управления интерфейсом SPI в микроконтроллерах используются регистры SSPSTAT (рис. 7.9) и SSPCON1 (рис. 7.10).
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| SMP | CKE | D/A | P | S | R/W | UA | BF |
Рис. 7.9. Регистр SSPSTAT микроконтроллеров PIC
Назначение разрядов регистра SSPSTAT:
-BF – флаг заполнения буфера данных;
-UA, R/W, S, P, D/A имеют отношение к рассмотренному ниже последовательному интерфейсу ГС;
-СКЕ – выбор активного фронта импульсов SCK для передачи данных (используется совместно с разрядом СКР регистра SSPCON1, аналог в микроконтроллерах AVR – разряд SPHA регистра SPCR);
-SMP – точка стробирования данных в режиме Master (1 – стробирование в конце битового интервала; 0 – стробирование в середине интервала). В режиме Slave этот разряд всегда содержит лог. 0.
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| WCOL | SSPOV | SSPEN | CKP | SSPM3 | SSPM2 | SSPM1 | SSPM0 |
Рис. 7.10. Регистр SSPCON1 микроконтроллеров PIC
Назначение разрядов регистра SSPCON1:
-SSPM0-SSPM3 – выбор режима работы порта MSSP (значения для интерфейса SPI представлены в табл. 7.5);
-СКР – выбор фронта для передачи (аналог в микроконтроллерах AVR – разряд CPOL регистра SPCR); если СКР=0? то передача осуществляется по нарастающему фронту тактового сигнала;
-SSPEN – флаг разрешения работы интерфейса SPI;
-SSPOV – флаг переполнения приемного буфера;
-WCOL – флаг коллизий при записи (1 – запись новых данных в буферный регистр была произведена в момент передачи).
Таблица 7.5. Выбор режима работы порта MSSP для интерфейса SPI
| SSPM3 | SSPM2 | SSPM1 | SSPM0 | Режим |
| 0 | 0 | 0 | 0 | Режим Master, частота = Fosc / 4 |
| 0 | 0 | 0 | 1 | Режим Master, частота = Fosc /16 |
| 0 | 0 | 1 | 0 | Режим Master, частота = Fosc / 64 |
| 0 | 0 | 1 | 1 | Режим Master, частота = выход TMR2 / 2 |
| 0 | 1 | 0 | 0 | Режим Slave, вывод SS разрешен |
| 0 | 1 | 0 | 1 | Режим Slave, вывод SS не используется |
Синхронная передача данных по интерфейсу I2С
Интерфейс I2С (Inter-integrated Circuit), состоящий только из двух линий (SDA и SCL), предназначен для низкоскоростного последовательного обмена данными с периферийными устройствами, подсоединенных к одной общей шине (рис. 7.11).
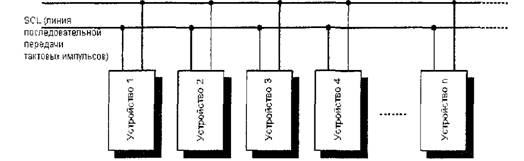
Рис. 7.11. Подключение устройств к шине I2C
Характеристики шины I2С:
-работа только с двумя линиями, благодаря чему требуется меньше мест соединения и минимизируются затраты на проводку;
-зона действия – до 3 м;
-возможность работать в режиме с одним ведущим блоком (Single-Master) или с несколькими ведущими блоками (Multi-Master).
Линия SCL используется для передачи синхроимпульсов. Если данные не передаются, она содержит высокий уровень сигнала. Линия SDA используется для побитной передачи данных. Если данные не передаются, то она имеет высокий потенциал. Передаваемые данные действительны в фазе высокого уровня такта и могут менять свое состояние только в фазе низкого уровня.
Каждый блок, подсоединенный к шине, во время передачи данных может быть или приемником или передатчиком, а также ведущим (Master) или ведомым (Slave). Ведущее устройство инициирует передачу данных. В частности, Master занимает шину тем, что генерирует стартовый сигнал на линии SCL и начинает обмен с ведомым устройством. До тех пор, пока на шине работает ведущее устройство, не может быть активным никакой другой Master-блок.
Ведомым является устройство, по адресу которого обращается ведущее устройство с требованием передачи данных. Теоретически Master может одновременно снабжать одними и теми же данными несколько ведомых устройств. В роли ведущего устройства в большинстве случаев выступает микропроцессор, оборудованный или специальной аппаратной частью с шиной типа I2С, или контроллером шины, работающим под управлением специального программного обеспечения.
Протокол шины I2С
Для того чтобы несколько блоков могли обмениваться данными, необходим некоторый протокол, который описывает процесс передачи данных по шине и в любой момент времени не допускает ошибочной интерпретации состояния шины. В случае шины с несколькими ведущими устройствами (что относится и к I2С) необходимо также установить, когда и какое ведущее устройство имеет право занимать шину. Эти условия регулируются протоколом шины (рис. 7.12).
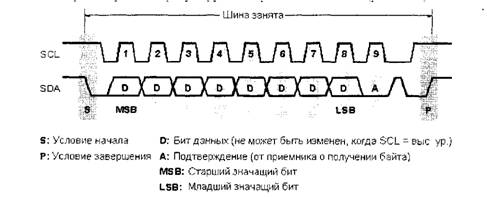
Рис. 7.12. Протокол передачи байта данных через шину I2C
Работа шины и ее занятость, определяется условием начала передачи – изменение ведущим устройством состояние линии SDA с высокого уровня на низкий. После наступления условия начала передачи шина будет занята ведущим устройством, создавшим это условие, вследствие чего все другие ведущие устройства будут заблокированы. Условие начала является однозначным состоянием на шине, потому что смена уровня сигнала на линии SDA, как правило, допускается только тогда, когда тактовая линия SCL находится в состоянии низкого уровня.
Все устройства, подключенные к шине, должны распознать условие начала передачи и переключаются на прием (ведомое устройство/приемник). Условие начала передачи также учитывается и другим ведущим устройством, которое со своей стороны имело намерение занять шину. В результате оно немедленно отзывает свое требование. Устройство, создавшее условие начала передачи, в данный момент времени является для шины ведущим (Master), а все остальные устройства – потенциальными ведомыми (Slave). Ведущее устройство теперь отвечает за тактовый сигнал и становится передатчиком.
После создания условия начала ведущее устройство начинает передачу данных. Оно переводит тактовую шину в состояние низкого уровня и теперь может занять линию передачи данных затребованным информационным разрядом (высокий или низкий уровень в линии SDA). Затем тактовая шина опять переводится в состояние высокого уровня.
Изменение в линии SDA может происходить только в фазе низкого уровня сигнала в линии SCL Во время фазы высокого уровня в линии SCL линия SDA должна быть стабильной.
Передача данных, как правило, выполняется побайтно, при этом первым передается старший разряд. После передачи полного байта данных, состоящей из восьми тактовых циклов, следует бит подтверждения от приемника.
Бит подтверждения (квитирования) – это реакция приемника на принятый байт данных. Он является для передатчика признаком того, что приемник физически присутствует и "прослушивает" линию. Одновременно с этим бит подтверждения можно рассматривать как сигнал синхронизации.
Бит подтверждения, как правило, генерируется приемником. Если ведущее устройство принимает от ведомого устройства несколько байтов данных, то оно квитирует каждый отдельный байт битом подтверждения, за исключением последнего. Такое отрицательное квитирование сообщает ведомому устройству, что передача данных завершена, и далее последует условие завершения или новое условие начала передачи.
Для передачи бита подтверждения ведущее устройство генерирует на линии SCL дополнительный тактовый импульс (рис. 7.13). Приемник выдает сигнал положительного квитирования, переводя линию SDA в состояние низкого уровня, или отрицательного квитирования, переводя линию SDA в состояние высокого уровня.
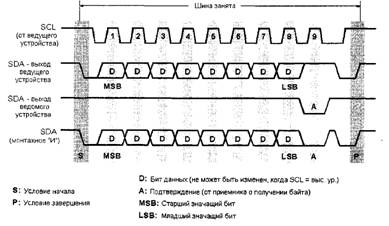
Рис. 7.13. Выработка бита квитирования приемником, работающим в режиме ведомого устройства
Таким образом, для передачи одного байта данных, как правило, требуется девять тактовых циклов. После передачи одного байта данных и приема бита подтверждения передача данных может быть сразу же продолжена. Если приемник реагирует на передачу байта данных отрицательным квитированием, то ведущее устройство должно завершить передачу данных, опять освободив шину.
Шина после окончания передачи данных, которая может состоять из любого количества байтов, опять освобождается ведущим устройством. Освобождение шины осуществляется с помощью условия завершения изменение в линии SDA уровня сигнала с низкого на высокий в то время, когда по тактовой шине SCL передается сигнал высокого уровня.
После создания условия завершения передачи шина освобождается. Условие завершения передачи также представляет собой однозначное состояние на шине. Все блоки и устройства распознают его и подготавливаются к появлению нового условия начала передачи. В том случае, если ведущее устройство из-за промежуточной занятости шины отзывает свое требование занять шину, то оно может предпринять новую попытку создать условие начала передачи и тем самым получить шину для своих нужд.
Полная передача данных через шину I2С, в принципе, состоит из условия начала передачи, одного или нескольких байтов данных (за которыми, соответственно, следует бит квитирования), и условия завершения передачи.
Адресация ведомых устройств
Выбор ведомого устройства, с которым хотело бы обмениваться данными ведущее устройство, осуществляется посредством первого байта, который всегда определяется как адрес ведомого устройства первый байт последовательности данных. Он однозначно сопоставлен определенному устройству, подключенному к шине, и имеет длину 7 бит (разряды от 1 до 7). Теоретически, таким образом можно адресовать до 128 ведомых устройств, однако по определению некоторые адреса ведомых устройств имеют особое значение. Адрес ведомого устройства состоит из двух частей: постоянной и переменной (рис. 7.14).
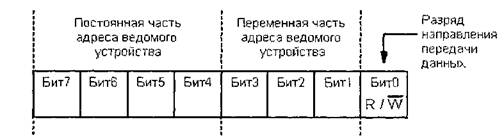
Рис. 7.14. Формат адреса шины I2C
Постоянная часть адреса описывает требования к определенным группам устройств и определяется изготовителем. Его длина определена в результате практического опыта и в большинстве случаев составляет 4 бита. Он будет тем короче, чем больше однотипных устройств в схеме. Постоянная часть адреса жестко "прошита" в интегральной схеме и не может быть изменена пользователем.
Переменная часть адреса ведомого устройства служит для выбора определенного устройства из группы однотипных кристаллов, среди которых все имеют постоянную часть адреса ведомого устройства. Благодаря этому, к шине могут быть подсоединены несколько однотипных интегральных схем. Переменная часть
в большинстве случаев определяется пользователем с помощью внешних схем (через дополнительные выводы).
С помощью разрядов 1-7 адреса ведомого устройства однозначно идентифицируется требуемый ведомый блок. Разряд 0 задает направление передачи данных. Он определяет, должны ли быть приняты или переданы данные. Если разряд направления передачи данных содержит лог. 1 (чтение), то ведущее устройство находится в режиме приемника, а ведомое – в режиме передатчика. Если разряд направления передачи данных содержит лог. 0 (запись), то ведущее устройство будет работать как передатчик, а ведомое – как приемник.
Адрес ведомого устройства также подтверждается этим устройством с помощью бита квитирования. Если ведущее устройство после адресации получает отрицательное квитирование, то оно может заключить, что ведомое устройство или вообще отсутствует, или в настоящий момент с ним невозможно установить связь (например, оно занято обработкой заданий, критическими с точки зрения времени).
Работа с интерфейсом I2С в микроконтроллерах PIC
Интерфейс I2C аппаратно реализован не во всех микроконтроллерах AVR, однако, благодаря высокому допустимому значению тактовой частоты, возможна его организация с помощью программного обеспечения.
В микроконтроллерах PIC обмену данными по интерфейсу 12С соответствует особый режим работы порта MSSP. Линии SCL соответствует вывод 3 порта С, а линии SDA – вывод 4 того же порта.
Для управления передачей в режиме I2С используются три регистра: уже рассмотренные выше SSPSTAT (рис. 7.8) и SSPCON1 (рис. 7.9), а также SSPCON2 (рис. 7.10).
Назначение разрядов регистра SSPSTAT, имеющих отношение к 12С:
-BF – флаг заполнения буфера данных;
-UA – устанавливается в лог. 1 в том случае, если необходимо модифицировать адрес устройства (содержимое регистра SSPADD);
-R/W – указывает на тип операции: 0 – запись, 1 – чтение;
-S – устанавливается в лог. 1 при обнаружении условия начала передачи;
-Р – устанавливается в лог. 1 при обнаружении условия завершения передачи;
-D/A – признак переданного байта: 0 – байт адреса, 1 – байт данных. Назначение разрядов регистра SSPCON1, имеющих отношение к I2С:
-SSPM0-SSPM3 – выбор режима работы порта MSSP (значения для интерфейса I С представлены в табл. 7.6);
-СКР – установка этого разряда в лог. 1 разрешает тактирование;
-SSPEN – флаг разрешения работы интерфейса;
-SSPOV – флаг переполнения приемного буфера;
-WCOL – флаг коллизий при записи (1 – запись новых данных в буферный регистр была произведена в момент передачи).
Таблица 7.6. Выбор режима работы порта MSSP для интерфейса l2C
| SSPM3 | SSPM2 | SSPM1 | SSPMO | Режим |
| 0 | 1 | 1 | 0 | Режим Slave, используется 7-разрядный адрес |
| 0 | 1 | 1 | 1 | Режим Slave, используется 10-разрядный адрес |
| 1 | 0 | 0 | 0 | Режим Master, частота = F0sc / (4 (SSPADD + 1)) |
| 1 | 0 | 1 | 1 | Режим Master с программным управлением |
| 1 | 1 | 1 | 0 | Режим Slave, используется 7-разрядный адрес |
| 1 | 1 | 1 | 1 | Режим Slave, используется 10-разрядный адрес |
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| GCEN | ACKSTAT | ACKDT | ACKEN | RCEN | PEN | RSEN | SEN |
Рис. 7.15. Регистр SSPCON2 микроконтроллеров PIC
Назначение разрядов регистра SSPCON2:
-SEN – устанавливается в лог. 1 для создания условия начала передачи;
-RSEN – устанавливается в лог. 1 для создания повторных условий начала передачи;
-PEN – сбрасывается в лог. О для создания условия окончания передачи;
-RCEN – устанавливается в лог. 1 для разрешения режима приема;
-ACKEN – инициирует последовательность битов квитирования;
-ACKDT – устанавливается в лог. 1 для отправки подтверждения при приеме байта;
-ACKSTAT устанавливается в лог. 1 при получении подтверждения приема от ведомого устройства.
Модуль шины CAN
Когда осуществляется обмен данными между несколькими устройствами по одной общей шине, существует вероятность возникновения самых разнообразных ошибок. Кроме того, возникают сложности с адресацией. В системе, состоящей из двух устройств, все очень просто: одно устройство передает данные, а другое опрашивает шину и принимает данные. В случае же с несколькими устройствами, требуется определить, какое именно из них передает данные и какому из устройств, подключенных к общей шине. Все это обусловливает необходимость в некотором протоколе обмена данными.
Протокол определяет метод адресации, проверку ошибок и общий формат данных для всех устройств, использующих шину. Один из таких протоколов – протокол CAN (Controller Area Network), поддерживаемый рядом микроконтроллеров семейства PIC18 и некоторыми последними разработками компании Atmel.
3. Аналого-цифровое преобразование
Число в цифровой форме определяется на основании отношения входного напряжения к полному номиналу напряжения аналого-цифрового преобразователя (АЦП). Например, если на вход АЦП с номинальным напряжением 5 В подать напряжение 1 В„ то на цифровом выходе появится число, соответствующее 1/5=0,2 разрешающей способности преобразователя. Так, если используется АЦП с разрешением 8 бит, то максимальное возможное значение на его выходе 2 - 1 = 255. Таким образом, напряжению 1 В на аналоговом входе соответствует 0,2 - 255 = 51 на цифровом выходе.
Встроенные АЦП микроконтроллеров AVR и PIC имеют разрешение 10 бит и позволяют считывать напряжение на одном из восьми (в некоторых моделях – пяти) аналоговых входов (обычно – порт А).
В микроконтроллерах AVR для управления режимом АЦП используются два регистра: регистр управления ADCSR (рис. 8.1) и регистр мультиплексирования ADMUX (определяет, какие из восьми входов порта А являются аналоговыми).
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| ADEN | ADSC | ADFR | ADIF | ADIE | ADPS2 | ADPS1 | ADPS0 |
Рис. 8.1. Регистр ADCSR микроконтроллеров AVR
Назначение разрядов регистра ADCSR:
-ADPS0 – ADPS2 – выбор коэффициента деления тактовой частоты (табл. 8.1); чем выше частота работы АЦП (производная от частоты системной синхронизации), тем ниже эффективное разрешение, поэтому следует устанавливать коэффициент деления;
-ADIE – разряд маскирования прерывания от АЦП (1 – по окончанию преобразования разрешено прерывание);
-ADIF – флаг прерывания от АЦП (устанавливается аппаратно по окончанию цикла преобразования);
-ADFR – лог. 1 в этом разряде переводит АЦП в несинхронизированный режим работы – обычно АЦП работает в режиме прерывания, чтобы процессор каждый раз не ожидал завершения медленно протекающего преобразования, однако в несинхронизированном режиме АЦП выполняет преобразование постоянно, как можно быстрее (на период такого преобразования должны быть запрещены все прерывания);
-ADSC – флаг начала преобразования;
-ADEN – флаг разрешения использования АЦП.
Таблица 8.1. Выбор коэффициента деления частоты системной синхронизации для тактирования АЦП микроконтроллеров AVR
| ADPS2 | ADPS1 | ADPS0 | Коэффициент деления |
| 0 | 0 | 0 | 1 |
| 0 | 0 | 1 | 2 |
| 0 | 1 | 0 | 4 |
| 0 | 1 | 1 | 8 |
| 1 | 0 | 0 | 16 |
| 1 | 0 | 1 | 32 |
| 1 | 1 | 0 | 64 |
| 1 | 1 | 1 | 128 |
Таким образом, в общем случае процесс аналого-цифрового преобразования в микроконтроллерах AVR протекает следующим образом:
-установить в лог. 1 разряды регистра ADMUX, соответствующие аналоговым входам;
-установить разряды 0-2 регистра ADCSR для выбора коэффициента деления частоты системной синхронизации;
-установить в лог. 1 разряд ADIE для разрешения режима прерывания;
-установить в лог. 1 разряд ADEN, чтобы разрешить использование АЦП;
-установить в лог. 1 разряд ADSC, чтобы начать преобразование;
-результат преобразования сохраняется в регистровой паре ADCL, ADCH;
В микроконтроллерах PIC для управления работой встроенного АЦП также используются два регистра: ADCON0 (рис. 8.2) и ADCON1 (рис. 8.3).
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| ADCS1 | ADCS0 | CHS2 | CHS1 | CHS0 | GO/DONE | ADIF | ADON |
Рис. 8.2. Регистр ADCON0 микроконтроллеров PIC
Назначение разрядов регистра ADCON0:
-ADON – флаг разрешения использования АЦП;
-ADIF – разряд запроса на прерывание по окончанию преобразования;
-GO/DONE – установка этого разряда в лог. 1 активизирует АЦП; по окончанию преобразования автоматически сбрасывается в лог. 0;
-CHS0-CHS2 – выбор аналогового входа порта А (назначение этих разрядов зависит от типа микроконтроллера);
-ADCS0-ADCS1 – выбор рабочей частоты АЦП (табл. 1.24).
Таблица 8.2. Выбор рабочей частоты АЦП микроконтроллеров PIC
| ADCS1 | ADCS0 | Частота |
| 0 | 0 | Частота системной синхронизации / 2 |
| 0 | 1 | Частота системной синхронизации / 8 |
| 1 | 0 | Частота системной синхронизации / 32 |
| 1 | 1 | Тактирование от встроенного RC-осциллятора АЦП (250 кГц) |
Максимальная допустимая рабочая частота АЦП микроконтроллеров PIC – 625 кГц. Это следует учитывать при выборе коэффициента деления частоты системной синхронизации.
Использование внутреннего RC-осциллятора АЦП не рекомендуется для микроконтроллеров с частотой системной синхронизации выше 1 МГц.
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| ADFM | – | – | – | PCFG3 | PCFG2 | PCFG1 | PCFG0 |
Рис. 8.3. Регистр ADC0N1 микроконтроллеров PIC
Назначение разрядов регистра ADCON1;
-PCFG0-PCFG3 – разряды конфигурации – определяют, какие выводы порта АЦП являются аналоговыми входами, а какие используются для подачи опорных напряжений Vref+ и Vref–; наиболее распространенная конфигурация: 0000, которая определяет все 8 выводов аналоговыми входами, а в качестве опорных напряжений – напряжения VDD и Vss; другие значения разрядов PCFG0-PCFG3 варьируются в зависимости от типа микроконтроллера;
-ADFM – выбор разрешения преобразования: 1 – 10 бит; 0 – 8 бит.
Результат преобразования сохраняется в регистровой паре ADRESL, ADRESH, причем в регистре ADRESH используются только младшие два разряда в случае преобразования с разрешением 10 бит.
Таким образом, в общем случае процесс аналого-цифрового преобразования в микроконтроллерах PIC протекает следующим образом:
-определить с помощью разрядов регистра ADCON1 конфигурацию преобразования;
-установить разряды 6-7 регистра ADCON0 для выбора рабочей частоты АЦП;
-установить разряды 3-5 регистра ADCON0 для выбора аналогового канала;
-установить в лог. 1 разряды ADON и GO регистра ADCON0, чтобы начать преобразование;
-дождаться окончания преобразования (лог. 0 в разряде DONE регистра ADCON0) и считать результат из регистровой пары ADRESLL, ADRESH.
Встроенный аналоговый компаратор
В ряде моделей микроконтроллеров AVR и PIC используется встроенный аналоговый компаратор напряжения, сравнивающий входное напряжение на двух входах. Как только напряжение на неинвентирующем входе станет больше, чем на инвентирующем, на выходе компаратора устанавливается лог. 1. Часто аналоговый компаратор используют для сравнения некоторого входного напряжения с опорным (рис. 8.4).
Для активизации компаратора требуется предварительно перевести соответствующие выводы микроконтроллера в режим входов. Время срабатывания компараторов небольшое, поэтому с их помощью можно быстро формировать ответные реакции на изменение соотношений входных напряжений.
В микроконтроллерах AVR входам компаратора AIN0 и AIN1 обычно соответствуют разряды 0/1 или 2/3 порта В. В микроконтроллерах PIC конфигурация входов компаратора (вывода порта А) настраивается с помощью разрядов регистра CMCON, о чем речь пойдет чуть позже.
В микроконтроллерах AVR для управления работой аналогового компаратора используется регистр ACSR (рис. 8.5), расположенный в области ввода/вывода по адресу 0x08 (адрес 0x28 в SRAM).
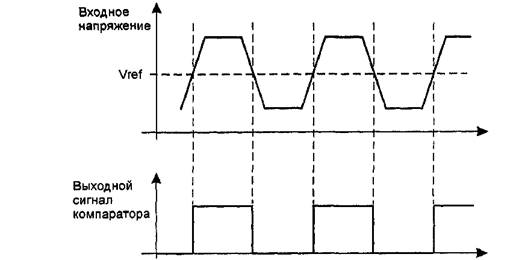
Рис. 8.4. Принцип работы аналогового компаратора напряжений
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| ACD | – | ACO | ACI | ACIE | ACIC | ACIS1 | ACIS0 |
Рис. 8.5. Регистр ACSR микроконтроллеров AVR
Назначение разрядов регистра ACSR:
-ACD – если установлен в лог. 1, то питание аналогового компаратора отключено;
-АСО – напрямую связан с выходом аналогового компаратора;
-ACI – флаг прерываний от аналогового компаратора – устанавливается в лог. 1, когда наступает событие, определенное разрядами ACIS1 и ACIS0;
-ACIE – разряд разрешения прерывания от аналогового компаратора;
-ACIC – разряд разрешения захвата на входе аналогового компаратора; для того чтобы можно было вызвать прерывание по захвату, оно должно быть разрешено разрядом TICIE1 в регистре TIMSK;
-ACIS1, ACIS0 устанавливают вид события на выходе аналогового компаратора, которое должно вызвать прерывание его работы (табл. 8.3).
Таблица 8.3. Вид событий для вызова прерывания от аналогового компаратора
| ACIS1 | AC1S0 | Вид прерывания аналогового компаратора |
| 0 | 0 | Прерывание при изменении состояния выхода (разряда АСО) |
| 0 | 1 | Не используется |
| 1 | 0 | Прерывание по ниспадающему фронту на выходе аналогового компаратора (напряжение на AIN1 больше, чем на AIN0) |
| 1 | 1 | Прерывание по нарастающему фронту на выходе аналогового компаратора (напряжение на AIN0 больше, чем на AIN1) |
В микроконтроллерах PIC могут использоваться два аналоговых компаратора – в частности, в серии Р1С16С62х. В этом случае для управления их работой предназначен регистр CMCON (рис. 8.6).
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| C2OUT | C1OUT | – | – | CIS | CM2 | CM1 | CM0 |
Рис. 8.6. Регистр CMCON микроконтроллеров серии Р1С16С62х
-СМ0-СМ2 – выбор режима работы компаратора (табл. 1.26);
-CIS – разряд управления входным коммутатором компаратора (табл. 8.4);
-C10UT – выходной сигнал компаратора 1;
-C20UT – выходной сигнал компаратора 2.
Таблица 8.4. Конфигурация входов компараторов напряжения в серии Р1С16С62х
| CIS | СМ2 | СМ1 | CM0 | Компаратор 1 | Компаратор 2 | ||
| Вход + | Вход– | Вход + | Вход– | ||||
| X | 0 | 0 | 0 | RA0 | RA3 | RA2 | RA1 |
| 0 | 0 | 0 | 1 | RA2 | RA0 | RA2 | RA1 |
| 1 | 0 | 0 | 1 | RA2 | RA3 | RA2 | RA1 |
| 0 | 0 | 1 | 0 | Vref | RA0 | Vref | RA1 |
| 1 | 0 | 1 | 0 | Vref | RA3 | Vref | RA2 |
| X | 0 | 1 | 1 | RA2 | RA0 | RA2 | RA1 |
| X | 1 | 0 | 0 | RA3 | RA0 | RA2 | RA1 |
| X | 1 | 0 | 1 | - | – | RA2 | RA1 |
| X | 1 | 1 | 0 | RA2 | RA0 | RA2 | RA1 |
| X | 1 | 1 | 1 | - | - | - | - |
Общие сведения
В общей сложности микроконтроллеры семейства Mega поддерживают следующие режимы программирования:
-режим последовательного программирования (по интерфейсу SPI);
-режим параллельного программирования при высоком напряжении;
-режим программирования через интерфейс JTAG.
Под “высоким” напряжением здесь понимается управляющее напряжение (12 В), подаваемое на вывод RESET микроконтроллера для перевода последнего в режим программирования.
Режимы программирования для конкретного микроконтроллера представлены в табл. 9.1.
Таблица 14.1. Режимы программирования микроконтроллеров семейства Mega
| Режим программирования | ATmega 8515x/8535x | ATmega 8x | ATmega 16x/32x | ATmega 64x/128x | ATmega 48x/88x/168x | ATmega 162x | ATmega 164x/324x ATmega 644x | ATmega 165x | ATmega 325x/3250x, ATmega 645x/6450x |
ATmega 640x, ATmega 1280x/1281x, ATmega 2560x2561x |
| 1.Последовательное, по интерфейсу SPI | + | + | + | + | + | + | + | + | + | + |
| 2. Параллельное, при высоком напряжении | + | + | + | + | + | + | + | + | + | + |
| 3. По интерфейсу JTAG | + | + | + | + | + | + | + |
Кроме того, микроконтроллеры семейства Mega имеют возможность самопрограммирования. Под этим термином понимается изменение содержимого памяти программ, управляемое самим микроконтроллером.
В процессе программирования могут выполняться следующие операции:
-стирание кристалла (chip erase);
-чтение/запись FLASH-памяти программ;
-чтение/запись EEPROM-памяти данных;
-чтение/запись конфигурационных ячеек;
-чтение/запись ячеек защиты;
-чтение ячеек идентификатора;
-чтение калибровочного байта.
Все модели микроконтроллеров поставляются со стертой памятью программ и памятью данных (во всех ячейках находится число $FF) и пригодны к немедленному программированию.
Защита кода и данных
Содержимое FLASH-памяти программ, а также содержимое EEPROM-памяти данных может быть защищено от записи и/или чтения посредством программирования ячеек защиты (Lock Bits) LB1 и LB2. Возможные режимы защиты, соответствующие различным состояниям этих ячеек, приведены в табл. 8.2.
Таблица 8.2. Режимы защиты
| № режима | Ячейки защиты | Описание | |
| LB1 | LB2 | ||
| 1 | 1 | 1 | Защита кода и данных отключена |
| 2 | 0 | 1 | Запись FLASH и EEPROM запрещена |
| 3 | 0 | 0 | Запрещены запись и чтение FLASH и EEPROM |
В режимах 2 и 3 запрещается также изменение конфигурационных ячеек. Поэтому включение защиты следует выполнять в самую последнюю очередь, после программирования остальных областей памяти микроконтроллера.
Во всех микроконтроллерах семейства, кроме ATmega48x, имеется четыре дополнительные ячейки защиты — BLB02, BLB01, BLB12 и BLB11. Ячейки BLB02:BLB01 определяют уровень доступа из секции загрузчика к коду, расположенному в секции прикладной программы, а ячейки BLB12:BLB11, наоборот, определяют уровень доступа из секции прикладной программы к коду, расположенному в секции загрузчика. Отсутствие указанных ячеек в модели ATmega48x обусловлено отсутствием у последней выделенной секции загрузчика. Возможные режимы защиты, соответствующие различным состояниям этих ячеек, приведены в табл. 9.3 и табл. 9.4 соответственно.
Таблица 9.3. Режимы защиты секции прикладной программы
| № режима | Ячейки защиты | Описание | |
| BLB02 | BLB01 | ||
| 1 | 1 | 1 | Нет никаких ограничений по доступу к коду, расположенному в секции прикладной программы |
| 2 | 1 | 0 | Команда SPM не может осуществлять запись по адресам, находящимся в пределах секции прикладной программы |
| 3 | 0 | 0 |
Команда SPM не может осуществлять запись по адресам, находящимся в пределах секции прикладной программы, и команда LPM (ELPM), вызываемая из секции загрузчика, не может осуществлять чтение из секции прикладной программы. Если таблица векторов прерываний расположена в секции загрузчика, то при выполнении кода из секции прикладной программы прерывания запрещены |
| 4 | 0 | 1 |
Команда lpm (elpm), вызываемая из секции загрузчика, не может осуществлять чтение из секции прикладной программы. Если таблица векторов прерываний расположена в секции загрузчика, то при выполнении кода из секции прикладной программы прерывания запрещены |
Таблица 9.4. Режимы защиты секции загрузчика
| № режима | Ячейки защиты | Описание | |
| BLB12 | BLB11 | ||
| 1 | 1 | 1 | Нет никаких ограничений по доступу к коду, расположенному в секции загрузчика |
| 2 | 1 | 0 | Команда SPM не может осуществлять запись по адресам, находящимся в пределах секции загрузчика |
| 3 | 0 | 0 | Команда SPM не может осуществлять запись по адресам, находящимся в пределах секции загрузчика, и команда LPM (ELPM), вызываемая из секции прикладной программы, не может осуществлять чтение из секции загрузчика. Если таблица векторов прерываний расположена в секции прикладной программы, то при выполнении кода из секции загрузчика прерывания запрещены |
| 4 | 0 | 1 |
Команда lpm (elpm), вызываемая из секции прикладной программы, не может осуществлять чтение из секции загрузчика. Если таблица векторов прерываний расположена в секции прикладной программы, то при выполнении кода из секции загрузчика прерывания запрещены |
Все перечисленные ячейки защиты сгруппированы в одном байте. Расположение ячеек защиты в нем для разных моделей приведено на Рис. 14.1.
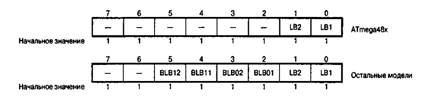
Рис. 9.1. Байт ячеек защиты
В исходном (запрограммированном) состоянии во всех ячейках защиты содержится 1, после программирования – 0. Стирание ячеек (запись в них лог. 1) может быть произведено только при выполнении команды “Стирание кристалла”, уничтожающей также содержимое FLASH- и EEPROM-памяти.
Конфигурационные ячейки
Как следует из названия, конфигурационные ячейки (Fuse Bits) определяют различные параметры конфигурации микроконтроллера. Эти ячейки расположены в отдельном адресном пространстве, доступном только при программировании. Все конфигурационные ячейки сгруппированы в несколько байтов, а состав этих ячеек зависит от конкретной модели микроконтроллера. Наличие тех или иных ячеек в конкретном микроконтроллере можно определить по табл. 9.5, где в столбцах, отмеченных звездочкой”, указаны состояния конфигурационных ячеек по умолчанию.
Краткое назначение всех конфигурационных ячеек приведено в табл. 9.6. Подробное описание их назначений было приведено в соответствующих главах книги.
Для изменения содержимого конфигурационных ячеек используются специальные команды программирования. Команда “Стирание кристалла” на состояние этих ячеек не влияет. Напоминаю, что при запрограммированной ячейке защиты LB1 конфигурационные ячейки блокируются. Поэтому конфигурацию микроконтроллера необходимо задавать до программирования ячеек защиты.
Таблица 9.5. Конфигурационные ячейки микроконтроллеров семейства
| Бит | ATmega8515x | ATmega8535x | ATmega8x |
ATmegal6x/ 32x |
ATtaega64x/ 128x | ATmega48x | ||||||
| Название | * | Название | * | Название | * | Название | * | Название | * | Название | * | |
|
Младший конфигурационный байт |
||||||||||||
| 7 | BODLEVEL | 1 | BODLEVEL | 1 | BODLEVEL | 1 | BODLEVEL | 1 | BODLEVEL | 1 | CKDIV8 | 0 |
| 6 | BODEN | 1 | BODEN | 1 | BODEN | 1 | BODEN | 1 | BODEN | 1 | CKOUT | 1 |
| 5 | SUT1 | 1 | SUT1 | 1 | SUT1 | 1 | SUT1 | 1 | SUT1 | 1 | SUT1 | 1 |
| 4 | SUT0 | 0 | SUTO | 0 | SUTO | 0 | SUTO | 0 | SUTO | 0 | SUTO | 0 |
| 3 | CKSEL3 | 0 | CKSEL3 | 0 | CKSEL3 | 0 | CKSEL3 | 0 | CKSEL3 | 0 | CKSEL3 | 0 |
| 2 | CKSEL2 | 0 | CKSEL2 | 0 | CKSEL2 | 0 | CKSEL2 | 0 | CKSEL2 | 0 | CKSEL2 | 0 |
| 1 | CKSEL1 | 0 | CKSEL1 | 0 | CKSEL1 | 0 | CKSEL1 | 0 | CKSEL1 | 0 | CKSEL1 | 1 |
| 0 | CKSEL0 | 1 | CKSELO | 1 | CKSELO | 1 | CKSELO | 1 | CKSELO | 1 | CKSELO | 0 |
|
Старший конфигурационный байт |
||||||||||||
| 7 | S8515C | 1 | S8535C | 1 | RSTDISBL | 1 | OCDEN | 1 | OCDEN | 1 | RSTDISBL | 1 |
| 6 | WDTON | 1 | WDTON | 1 | WDTON | 1 | JTAGEN | 0 | JTAGEN | 0 | DWEN | 1 |
| 5 | SPIEN | 0 | SPIEN | 0 | SPIEN | 0 | SPIEN | 0 | SPIEN | 0 | SPIEN | 0 |
| 4 | СКОРТ | 1 | CKOPT | 1 | CKOPT | 1 | CKOPT | 1 | CKOPT | 1 | WDTON | 1 |
| 3 | EESAVE | 1 | EESAVE | 1 | EESAVE | 1 | EESAVE | 1 | EESAVE | 1 | EESAVE | 1 |
| 2 | BOOTSZ1 | 0 | BOOTSZ1 | 0 | BOOTSZ1 | 0 | BOOTSZ1 | 0 | BOOTSZ1 | 0 | BODLEVEL2 | 1 |
| 1 | BOOTSZ0 | 0 | BOOTSZO | 0 | BOOTSZO | 0 | BOOTSZO | 0 | BOOTSZO | 0 | BODLEVEL1 | 1 |
| 0 | BOOTRST | 1 | BOOTRST | 1 | BOOTRST | 1 | BOOTRST | 1 | BOOTRST | 1 | BODLEVELO | 1 |
|
Дополнительный конфигурационный байт |
||||||||||||
| 7 | –– | — | 1 | — | ||||||||
| 6 | — | 1 | — | |||||||||
| 5 | — | 1 | — | |||||||||
| 4 | — | 1 | — | |||||||||
| 3 | — | 1 | — | |||||||||
| 2 | — | 1 | — | |||||||||
| 1 | M103C | 0 | — | |||||||||
| 0 | WDTON | 1 | SELFPRGEN | |||||||||
| * Значение бита. | ||||||||||||
Таблица 9.6. Назначение конфигурационных ячеек
| Название | Назначение | |
| RSTDISBL | Определяет функционирование 1 вывода микроконтроллера, совмещенного с выводом аппаратного сброса (0 контакт порта ввода/вывода, 1 — вывод сброса) | |
| CKSEL |
Определяет режим работы тактового генератора, а также длительность задержки сброса tTout |
|
| BODLEVEL | Определяет порог срабатывания схемы BOR | |
| BODEN | Разрешает/запрещает функционирование схемы BOR (0 — разрешено, 1 — запрещено) | |
|
SPIEN11) |
Разрешает/запрещает программирование по интерфейсу SPI (0 — разрешено, 1 — запрещено) | |
| SUT |
Определяет длительность задержки сброса tTout |
|
| WDTON | Определяет режим работы сторожевого таймера (0 — всегда включен, 1 — может быть выключен программно) | |
| СКОРТ | Определяет функционирование тактового генератора, действие зависит от установок ячеек CKSEL | |
|
EESAVE2) |
Определяет влияние команды Стирание кристалла” на EEPROM-память 0 — не стирает, 1 — стирает) | |
| BOOTSZ | Определяет размер секции загрузчика | |
| BOOTRST | Определяет положение вектора сброса | |
| DWEN | Разрешает/запрещает работу отладочного интерфейса debugWire (0 — разрешена, 1 — запрещена) | |
| OCDEN | Разрешает/запрещает внутрисхемную отладку (0 — разрешена, 1 — запрещена) | |
| JTAGEN | Разрешает/запрещает использование интерфейса JTAG (0 — разрешен, 1 — запрещен) | |
| CKDIV8 | Определяет начальное состояние делителя системного тактового сигнала | |
| CKOUT | Определяет состояние выходного буфера системного тактового сигнала (0 — подключен к выводу микроконтроллера, 1 — отключен) | |
|
SELFPRGEN3)) |
Разрешение самопрограммирования (0 разрешено) | |
| S8515C | Включает/выключает режим совместимости с микроконтроллерами AT90S4414/8515 семейства Classic (0 включен, 1 — выключен) | |
| S8535C | Включает/выключает режим совместимости с микроконтроллерами AT90S8535 семейства Classic (0 — включен, 1 — выключен) | |
| М161С | Включает/выключает режим совместимости с микроконтроллерами ATmega 161х семейства Mega (0 — включен, 1 выключен) | |
| М103С | Включает/выключает режим совместимости с микроконтроллерами ATmega 103x семейства Mega (0 - включен, 1 - выключен) | |
1) Недоступна при программировании по последовательному каналу
2) Изменение состояния этой ячейки вступает в силу сразу же после ее программирования.
3)Только в ATmega48x.
Идентификатор
Все микроконтроллеры фирмы Atmel имеют три 8-битные ячейки, содержимое которых позволяет идентифицировать устройство. В первой ячейке содержится код производителя $00, во второй — код объема FLASH-памяти $01, а в третьей — код устройства $02. Как и конфигурационные ячейки, ячейки идентификатора расположены в отдельном адресном пространстве, доступ к которому возможен только в режиме программирования. Однако в отличие от конфигурационных ячеек ячейки идентификатора, по понятным причинам, доступны только для чтения.
Значение кода устройства у разных моделей может совпадать. Поэтому устройство следует идентифицировать только по совокупности значений ячеек $01 и $02, так как именно эта пара чисел является уникальной для каждого микроконтроллера.
Калибровочные ячейки
В калибровочные ячейки при изготовлении микроконтроллера заносятся калибровочные константы, предназначенные для подстройки на номинальную частоту внутреннего RС-генератора. Количество этих ячеек зависит от того, на скольких частотах может работать внутренний RC-генератор. В моделях ATmega8515x/8535x и ATmega8x/16x/32x/64x/128x имеется четыре 8-битных ячейки, а в остальных моделях одна ячейка. Располагаются они в старших байтах адресного пространства ячеек идентификатора.
Загрузка калибровочной константы в регистр OSCCAL осуществляется аппаратно при нахождении микроконтроллера в состоянии сброса. Однако в моделях ATmega8515x/8535x и ATmega8x/16x/32x/64x/128x генератор автоматически калибруется только на частоту 1 МГц. Поэтому при использовании другой частоты RС-генератора его калибровку необходимо осуществлять вручную. Для этого программатор во время программирования должен прочитать содержимое калибровочной ячейки и занести его по какому-либо адресу FLASH-памяти программ. А программа должна после старта считать это значение из памяти программ и занести его в регистр OSCCAL.
Организация памяти программ и данных
В микроконтроллерах семейства Mega используется страничная организация памяти программ. При программировании весь объем FLASH-памяти разбивается на 16-битные страницы, размер которых, а также их количество зависят от объема памяти программ микроконтроллера.
Соответственно, при программировании памяти программ микроконтроллеров семейства Mega данные сначала загружаются в буфер страницы и только затем заносятся непосредственно в память программ. Прошивка всех ячеек страницы при этом осуществляется одновременно.
Аналогичным образом организована и EEPROM-память. Размер 8-битных страниц EEPROM-памяти.
Однако следует отметить, что во многих моделях страничная организация EEPROM-памяти используется только при программировании в параллельном режиме, а программирование по последовательному каналу осуществляется побайтно.
Программирование по последовательному каналу
В режиме программирования по последовательному каналу программирование памяти программ и данных осуществляется по последовательному интерфейсу SPI. Как правило, этот режим используется для программирования (перепрограммирования) микроконтроллера непосредственно в устройстве.
Схема включения микросхем в режиме программирования по последовательному каналу приведена на рис. 9.2. На этом же рисунке показано два варианта разводки колодки для подключения программатора, рекомендуемые компанией Atmel.
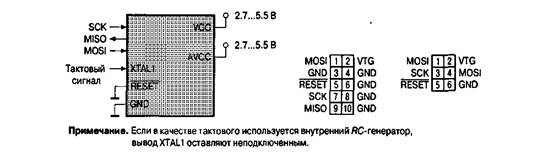
Рис. 9.2. Включение микроконтроллеров в режиме программирования по последовательному каналу
Как видно из рис. 9.2, для обмена данными между программатором и устройством используются три линии: SCK (тактовый сигнал), MOSI (вход данных) и MISO (выход данных).
Как и в рабочем режиме, при программировании по последовательному каналу микроконтроллеру требуется источник тактового сигнала. В качестве такового может использоваться любой из допустимых для микроконтроллера источников. При этом должно выполняться следующее условие: длительность импульсов как НИЗКОГО, так и ВЫСОКОГО уровня сигнала SCK должна быть больше 2 периодов тактового сигнала микроконтроллера.
Программирование осуществляется путем посылки 4-байтных команд на вывод MOSI микроконтроллера. Результат выполнения команд чтения снимается с вывода MISO микроконтроллера. Передача команд и выдача результатов их выполнения осуществляются от старшего бита к младшему. При этом “защелкивание” входных данных выполняется по нарастающему фронту сигнала SCK, а “защелкивание” выходных данных – по спадающему.
Переключение в режим программирования
Для перевода микроконтроллера в режим программирования по последовательному каналу необходимо выполнить следующие действия:
-подать на микроконтроллер напряжение питания, при этом на выводах SCK и RESET должно присутствовать напряжение НИЗКОГО уровня. Выждать не менее 20 мс;
-послать на вывод MOSI команду “Разрешение программирования”;
-для контроля прохождения команды при посылке 3-го байта возвращается значение 2-го байта ($53).
-после завершения программирования на вывод RESET можно подать напряжение ВЫСОКОГО уровня для перевода микроконтроллера в рабочий режим либо выключить его.
В последнем случае необходимо выполнить следующую последовательность действий:
-подать на вывод XTAL1 напряжение НИЗКОГО уровня, если тактирование микроконтроллера осуществляется от внешней схемы;
-подать на вывод RESET напряжение ВЫСОКОГО уровня;
-отключить напряжение питания от микроконтроллера.
Управление процессом программирования FLASH-памяти
Программирование памяти программ микроконтроллеров семейства Mega осуществляется постранично. Сначала содержимое страницы побайтно заносится в буфер по командам “Загрузка страницы FLASH-памяти”. В каждой команде передаются младшие биты адреса изменяемой ячейки (положение ячейки внутри страницы) и записываемое значение. Содержимое каждой ячейки должно загружаться в следующей последовательности: сначала младший байт, потом старший.
Фактическое программирование страницы FLASH-памяти осуществляется после загрузки буфера страницы по команде “Запись страницы FLASH-памяти”.
Следует помнить, что дальнейшее программирование памяти можно будет выполнять только после завершения записи страницы. Определить момент окончания записи можно тремя способами. Первый и наиболее простой способ — выдерживать между посылкой команд паузу. Второй способ заключается в контролировании содержимого любой из записываемых ячеек после посылки команды записи, а третий способ — опрос флага готовности RDY c помощью соответствующей команды.
Управление процессом программирования EEPROM-памяти
Во всех старых моделях программирование EEPROM-памяти осуществляется обычным способом – побайтно. А в новых моделях появился альтернативный способ записи EEPROM-памяти – постраничный. Содержимое страницы побайтно заносится в буфер по командам “Загрузка страницы EEPROM-памяти”, а затем осуществляется фактическое программирование страницы EEPROM-памяти по команде “Запись страницы EEPROM-памяти”. Значения адресов, передаваемые в этих командах, определяются так же, как и при программировании FLASH-памяти. Для определения момента окончания записи можно использовать любой из описанных выше способов.
Параллельное программирование
В режиме параллельного программирования от программатора к микроконтроллеру передаются одновременно все биты кода команды или байта данных. Этот режим задействует большое число выводов микроконтроллера и требует использования дополнительного источника повышенного напряжения. Поэтому программирование в параллельном режиме осуществляется специализированными программаторами. Основное применение этого режима прошивка” микроконтроллеров перед установкой их на плату в условиях массового производства.
Схема включения микросхем в режиме параллельного программирования приведена на рис. 9.3.
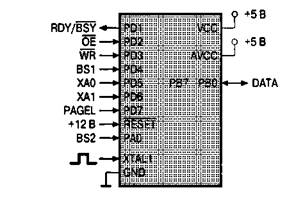
Рис. 9.3. Включение микроконтроллеров в режиме параллельного программирования
Таблица 9.7. Обозначение и функции выводов, используемых при программировании в параллельном режиме
| Сигнал | Вывод | Вход/Выход | Назначение |
| RDY/BSY | PD1 | Выход |
Состояние устройства: 0 – занято (выполняется предыдущая команда); 1 – готово к приему следующей команды. |
| ОЕ | PD2 | Вход |
Управление режимом работы шины данных РВ7...РВ0: 0 — выход, 1 — вход |
| WR | PD3 | Вход | Сигнал записи (активный уровень лог. 0) |
| BS1 | PD4 | Вход | Выбор байта (см. Табл. 14.14) |
| ХАО | PD5 | Вход | Определяют действие, выполняемое по положительному импульсу на выводе XTAL1 |
| ХА1 | PD6 | Вход | |
| PAGEL | PD7 | Вход | Сигнал загрузки страницы памяти |
| BS2 | РАО | Вход | Выбор байта (см. Табл. 14.14) |
| DATA | РВ7...РВ0 | Вход/Выход | Двунаправленная шина данных |
В общих чертах процесс программирования в этом режиме состоит из многократного выполнения следующих операций:
-загрузка команды;
-загрузка адреса;
-загрузка данных;
-выполнение команды.
Последовательность подачи сигналов на выводы микроконтроллера при выполнении различных базовых операций приведена в табл. 9.8.
Таблица 14.7. Базовые операции программирования в параллельном режиме
| № | Название операции | Действия |
| 1 | Загрузка команды |
1.Установить выводы ХА1, ХАО в состояние 10. 2.Подать на вывод BS1 напряжение лог. 0. 3.Выставить на шину DATA код команды. 4.Подать на вывод XTAL1 положительный импульс. |
| 2 | Загрузка адреса |
1.Установить выводы ХА1, ХАО в состояние 00 (загрузка адреса). 2.Установить выводы BS2:BS1 в состояние 00 (загрузка младшего байта), 01 (загрузка старшего байта) или 10 (загрузка дополнительного байта). 3.Выставить на шину DATA байт адреса. 4.Подать на вывод XTAL1 положительный импульс. |
| 3 | Загрузка данных |
1.Установить выводы ХА1, ХАО в состояние 01 (загрузка данных). 2.Подать на вывод BS1 напряжение лог. 0 (загрузка младшего байта) или лог. 1 (загрузка старшего байта). 3.Выставить на шину DATA содержимое байта данных. 4.Подать на вывод XTAL1 положительный импульс. |
| 4 | Запись данных в буфер страницы |
1.Подать на вывод BS1 напряжение лог. 1. 2.Подать на вывод PAGEL положительный импульс. |
| 5 | Запись байта конфигурации |
1.Установить выводы BS2:BS1 в состояние 00 (запись младшего байта), 01 (запись старшего байта) или 10 (запись дополнительного байта). 2.Подать на вывод WR отрицательный импульс; при этом на выводе RDY/BSY появляется сигнал НИЗКОГО уровня. 3.Ждать появления на выводе RDY/BSY сигнала ВЫСОКОГО уровня. |
| Запись страницы |
1.Установить выводы BS2:BS1 в состояние 00. 2.Подать на вывод WR отрицательный импульс; при этом на выводе RDY/BSY появляется сигнал НИЗКОГО уровня. 3.Ждать появления на выводе RDY/BSY сигнала ВЫСОКОГО уровня. |
Переключение в режим параллельного программирования
Первой операцией при программировании микроконтроллера является его перевод в режим программирования. Для перевода микроконтроллера в режим программирования необходимо выполнить следующие действия:
-подать на микроконтроллер напряжение питания;
-подать на вывод RESET напряжение НИЗКОГО уровня и сформировать не менее трех импульсов на выводе XTAL1;
-подать на выводы PAGEL, XA1, ХА0, BS1 напряжение НИЗКОГО уровня на время не менее 100 нс;
-подать напряжение 11.5... 12.5 В на вывод RESET и удерживать напряжение НИЗКОГО уровня на выводах PAGEL, XA1, ХА0, BS1 в течение, как минимум, 10 мкс. Любая активность на указанных выводах в течение этого времени приведет к тому, что микроконтроллер не перейдет в режим программирования выждать не менее 300 мкс перед посылкой следующей команды.
Стирание кристалла
Команда “Стирание кристалла” должна выполняться перед каждым перепрограммированием микроконтроллера. Данная команда полностью уничтожает содержимое FLASH- памяти и EEPROM-памяти, а затем сбрасывает ячейки защиты (записывает в них 1). Однако на состояние конфигурационных ячеек данная команда не влияет. Кроме того, в ряде моделей микроконтроллеров семейства Mega можно предотвратить стирание EEPROM-памяти путем программирования конфигурационной ячейки EESAVE.
Для выполнения команды “Стирание кристалла” необходимо выполнить следующие действия:
-загрузить команду Стирание кристалла”;
-подать на вывод WR сигнал НИЗКОГО уровня;
-ждать появления на выводе RDY/BSY сигнала ВЫСОКОГО уровня.
Программирование FLASH-памяти
Запись FLASH-памяти производится в следующей последовательности:
-загрузить команду Запись FLASH-памяти”;
1) загрузить младший байт адреса (положение ячейки внутри страницы);
2) загрузить младший байт данных;
3) загрузить старший байт данных;
4) запомнить данные в буфере;
5) повторить пп. 2...5 до полного заполнения буфера страницы;
6) загрузить старший байт адреса (номер страницы);
7) записать страницу.
8) повторить все пункты для записи остальных страниц памяти программ;
9) завершить программирование, загрузив команду “Нет операции”.
Необходимо отметить, что если для адресации ячейки памяти внутри страницы требуется меньше 8 битов (при размере страницы менее 256 слов), то оставшиеся старшие биты младшего байта адреса используются для адресации страницы при выполнении команды “Запись страницы”.
Для чтения FLASH-памяти необходимо выполнить следующие действия:
1) загрузить команду “Чтение FLASH-памяти”;
2) загрузить старший байт адреса;
3) загрузить младший байт адреса;
4) установить ОЕ и BS1 в 0, после этого с шины данных DATA можно будет считать значение младшего байта содержимого ячейки памяти;
5) установить BS1 в 1, после этого с шины данных DATA можно будет считать значение старшего байта содержимого ячейки памяти;
6) установить ОЕ в 1.
Программирование EEPROM-памяти
Запись EEPROM-памяти производится в следующей последовательности:
1) загрузить команду “Запись EEPROM-памяти”;
2) загрузить старший байт адреса;
3) загрузить младший байт адреса;
4) загрузить байт данных;
5) запомнить данные в буфере;
6) повторить пп. 3...5 до полного заполнения буфера;
7) записать страницу.
Для чтения содержимого EEPROM-памяти необходимо выполнить следующие действия:
1) загрузить команду “Чтение EEPROM-памяти”;
2) загрузить старший байт адреса;
3) загрузить младший байт адреса;
4) установить ОЕ и BS1 в 0, после этого с шины данных DATA можно будет считать содержимое ячейки памяти;
5) установить ОЕ в 1.
Программирование конфигурационных ячеек
Программирование байтов конфигурации микроконтроллеров семейства Mega осуществляется следующим образом.
Младший конфигурационный байт:
1) загрузить команду “Запись конфигурационных ячеек”;
2) загрузить младший байт данных. Если бит сброшен в 0, выполняется программирование соответствующей ячейки, если установлен в 1 – ее сброс;
3) записать младший байт конфигурации.
Старший конфигурационный байт:
1) Загрузить команду “Запись конфигурационных ячеек” (код 0100 0000).
2) Загрузить младший байт данных. Если бит сброшен в 0, выполняется программирование соответствующей ячейки, если установлен в 1 — ее сброс.
3) Записать старший байт конфигурации.
Программирование ячеек защиты
Программирование ячеек защиты выполняется аналогично программированию конфигурационных ячеек:
1) Загрузить команду “Запись ячеек защиты”;
2) Загрузить младший байт данных. Для программирования ячейки соответствующий бит должен быть сброшен в 0. Неиспользуемые биты должны быть всегда установлены в 1;
3) Записать младший байт конфигурации.
Программирование по интерфейсу JTAG
Общие сведения об интерфейсе JTAG
Интерфейс JTAG был разработан группой ведущих специалистов по проблемам тестирования электронных компонентов (Joint Test Action Group). В дальнейшем он был зарегистрирован в Институте инженеров по электротехнике и электронике (IEEE) в качестве промышленного стандарта IEEE Std 1149.1-1990 (IEEE Standard Test Access Port and Boundary-Scan Architecture).
Встроенный в большинство микроконтроллеров семейства, интерфейс JTAG может быть использован для следующих целей:
-тестирования печатных плат;
-конфигурирования (программирования) кристалла;
-внутрисхемной отладки.
Рассмотрим непосредственно только один из аспектов использования интерфейса JTAG, а именно программирование микроконтроллеров.
Доступ к модулю JTAG осуществляется через четыре вывода микроконтроллера, составляющих так называемый “порт тестового доступа” (Test Access Port — ТАР): TMS, TCK, TDI и TDO. Стандартная разводка 10-штырькового разъема для подключения JTAG-устройств приведена на рис. 9.4.
Работой модуля JTAG управляет так называемый ТАР-контроллер, представляющий собой конечный автомат с 16 состояниями. Диаграмма состояний ТАР-контроллера приведена на Рис. 14.14. Переход между состояниями осуществляется по нарастающему фронту сигнала ТСК в соответствии с сигналом, присутствующим на выводе TMS. После включения питания контроллер находится в состоянии Test-Logic-Reset.
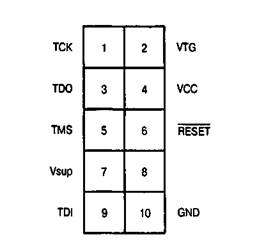
Рис. 9.4. Разводка разъема JTAG
Использование интерфейса JTAG для программирования кристалла
Разрешение/запрещение интерфейса JTAG осуществляется при помощи конфигурационной ячейки JTAGEN. Если она не запрограммирована (1), то выводы ТАР работают как обычные контакты портов ввода/вывода, а ТАР-контроллер находится в состоянии сброса. Для включения интерфейса ячейка JTAGEN должна быть запрограммирована (состояние по умолчанию). Кроме того, должен быть сброшен бит JTD регистра MCUCSR или MCUCR (рис. 9.5). Причем, для изменения состояния этого бита новое значение необходимо записать в него дважды в течение четырех тактов.
Описанный механизм позволяет использовать выводы ТАР как в качестве контактов портов ввода/вывода при нормальном функционировании микроконтроллера, так и в качестве выводов собственно порта JTAG при программировании кристалла. Разумеется, этот механизм не применим в том случае, если порт JTAG используется для отладки или тестирования.
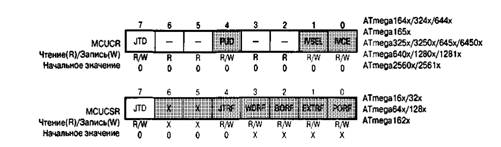
Рис. 9.5. Регистры MCUCSR/MCUCR применительно к интерфейсу JTAG
Команды JTAG, используемые при программировании
Из 16 команд, поддерживаемых интерфейсом, при программировании используются только пять.
AVR_RESET
Эта команда предназначена для перевода микроконтроллера в состояние сброса и соответственно вывода его из этого состояния. В качестве регистра данных выбирается 1-битный регистр сброса (Reset Register). Запись 1 в этот регистр эквивалентна подаче на вывод RESET микроконтроллера напряжения НИЗКОГО уровня. В состоянии сброса микроконтроллер будет находиться до тех пор, пока в регистр сброса не будет записан 0.
PROG_ENABLE
Эта команда предназначена для разрешения программирования кристалла через порт JTAG. В качестве регистра данных выбирается 16-битный регистр разрешения программирования (Programming Enable Register).
При записи в этот регистр числа $А370 (сигнатура разрешения программирования) разрешается программирование микроконтроллера по интерфейсу JTAG. При выходе из режима программирования этот регистр должен сбрасываться.
PROG_COMMANDS
Эта команда предназначена для загрузки команд программирования и выдачи результатов их выполнения (если они есть). В качестве регистра данных выбирается 15-битный регистр команд (Programming Command Register).
PROG_PAGELOAD
Эта команда предназначена для непосредственной загрузки страницы памяти программ через порт JTAG. Реализация этой команды зависит от модели микроконтроллера.
PROG_PAGEREAD
Эта команда предназначена для считывания содержимого страницы памяти программ через порт JTAG. Реализация этой команды также зависит от модели микроконтроллера.
© 2009 База Рефератов